From October, 2014
I am planning to build a rover that is based on the design that was conceived by OddBot with his Wild Thumper platform.
My rover will be constructed from sheet aluminum and will be quite simple in overall design. I will use six motors with three on each side of the rectangular-shaped chassis, to be steered in skid-steer fashion.
I am having trouble with finding low-cost motors with DC brush-type gearmotor design.
More to come…
**********************************************************************************************
I am planning to build a rover that is based on the design that was conceived by OddBot with his Wild Thumper platform.
My rover will be constructed from sheet aluminum and will be quite simple in overall design. I will use six motors with three on each side of the rectangular-shaped chassis, to be steered in skid-steer fashion.
I will be trying to do something like this: http://www.instructables.com/id/Six-wheeled-All-Terrain-Vehicle-6WD/ which is obviously based on OddBot’s Wild Thumper design. See a photo of this design below:
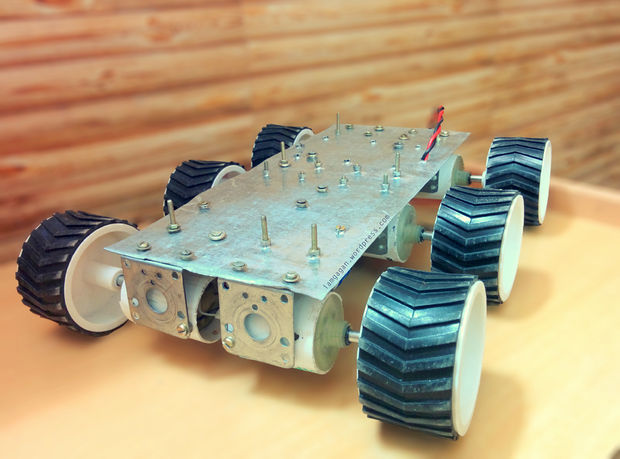
I have the sheet aluminum already, and that will be what I use for the chassis. I hope to have a basal platform layer from which to suspend the six brushed DC motors. On top of this, I plan to have an upper platform for electronics, etc., separated from the lower platform using standoffs.
I want to use 6-volt (nominal) DC gearmotors, with a stall current no more than 4 amps. Any ideas where I can obtain these will be welcomed.
10-06-2014
The rover will use six gearmotors, like shown above and on the Wild Thumper chassis detailed on Letsmakerobots.com at https://www.robotshop.com/letsmakerobots/node/14156 as an example. With the six motors configured for skid-steering, this is a wonderful platform that is also quite stable.
Here is another perfect example of what I plan to do. This is the Trekker from Beatty Robotics (http://beatty-robotics.com/all-terrain-gps-robot/), and I stumbled across it last year after I had already obtained a GPS unit, serial LCD, XBee units, PING sensors, three axis module, etc. I could not believe that someone else had the same basic idea for a rover! The Beatty folks sure are good at doing robotics development, as can be seen at their website. They used an Arduino to do all of their processing on this rover.
I am wanting to build the Geologic Inspection Rover (GeoRover for short) for use in my work and for my own edification. I am an engineering geologist employed with a state highway agency, and I can find all kinds of uses for the GeoRover. The first intended use for the GeoRover is basically to enter into drainage pipes and culverts, among other structures, and use a wireless video camera to view real-time images of the conditions of the pipe walls and other features. I am looking for ideas for a simple, color/infrared, wireless video camera. I want to see what the Rover sees as it moves around, but I would also like to be able to save images and video to an on-board memory device. Any ideas for a wireless camera with a range of at least 300 feet would be very helpful.
As for the controller, I want to try to use a Parallax Propeller (http://www.parallax.com/microcontrollers/propeller) as it has 8 cores, each with 32 bit I/O. That means that I can run eight different routines at the same time, which is pretty useful. I may use the Propeller Activity Board (http://www.parallax.com/product/32910) since I already have two of them. Parallax has a great support and discussion group with lots of code examples, so it is hard to go wrong with Parallax. The Propeller Activity Board (PAB) has a microSD card socket, so I may be able to store logged data or maybe even images somehow. Also, the PAB has an XBee socket and I may try to use it for wireless communications in lieu of a R/C system, etc. Still exploring this.
With the Propeller, I can write the code in either C, or in the SPIN high-level language developed for the Propeller. I have been thinking more about C, with the idea of porting over some useful code from the Arduino.
I will be writing more about my Rover ideas, and I welcome any and all advice and comments from the LMR community.


