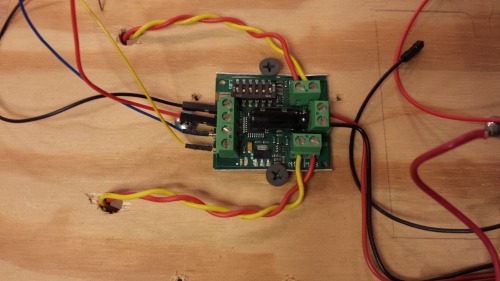
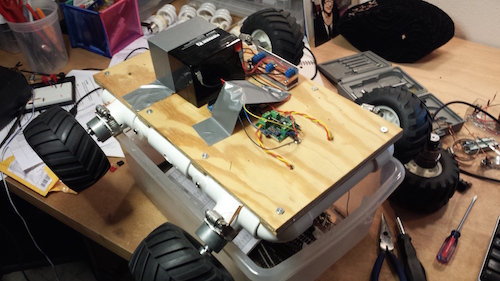
Here's my partial build of my six-wheeled GardenerBot. Ideally it will at least drive around the yard successfully! :D Based on the Wild Thumper design idea. Using a Sabertooth 2x5 motor controller and a 12V 5Ah battery. Using an Arduino to provide PWM signals to the Sabertooth.
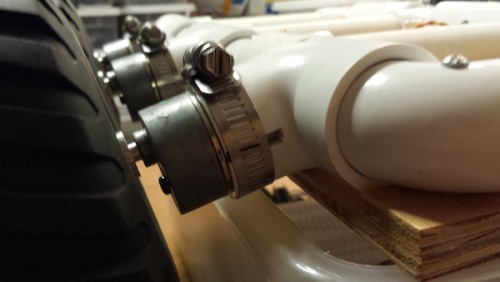
There is not much clearance between the tires. I ended up adding nylon washers to push the front and rear wheels to the outside. The washers rotate on screws, and help maintain spacing between the wheels. It is one way to stabilize the tees as they slide on their mount a bit with this design. I'm still not completely happy with the dimensions due to wheel-to-wheel clearance... a stick or rock between the wheels might jam them.
The dimensions of the robot are more square than the Wild Thumper. I think this would make it easier to use skid steering, as opposed to a long, thin profile, but I'm not sure. It should also make it more stable side to side. Going across a slope for example it should be less likely to roll. I think a Hummer is wider than a Jeep for that reason.
Update: After burning out a motor last night, I was seriously disappointed. Am I overdriving these motors? I throttled back on the speed and changed my marching orders in the Arduino. I went down to four wheels. Now I'm seeing, with the skid steering, that the outside rear wheel tends to fold under a bit. For example, when turning right, the left rear takes the most lateral inward stress and folds under somewhat. I'm thinking I need larger wheels, and more ground clearance. Putting the weight on the middle wheels makes even more sense, but now I've got to order a sixth motor...
I like your choice of using PVC, not sure where I have seen that done before. Oh Yeah my bot…LOL Great job on the frame build. Cant wait to see it run through the tomatoe plants and harvest the lettuce. Now all you need is a mower for it to pull behind and you can sit back and drink the ice tea and watch the lawn get cut.
PVC Great material, strong and easy to get. I see you posted about your bot, I’ll check it out.
Yes, how to stop it??! I want to get it to drive around under control first, then maybe do a pattern under control… like mow in a spiral, or a 10x10 square.
All the commercial ones use a live guide wire buried… do I have to do that? Maybe not. Landmarks? Training? Not sure, but it should be fun to explore.
Mech side Seems fun to try to find a good answer to cheapest + easiest + strongest + available … my wife is always wondering why I spend so long staring at things in the hardware store.
Serial comm No, I’m thinking I’ll use PWM… is the serial easy to interface to an Arduino? I think I wanted to keep the Arduino serial for debugging. And yes, 2x5, you are right!
Set the motor controller up as SoftwareSerial and you can still use the USB serial for debugging. I talk to both a RoboClaw (similar to the Sabertooth) and a Pololu Serial servo driver both with the SoftwareSerial lib. It has worked ok so far with no issues. It is easy to do the interface, it’s just TTL serial, so just RX/TX and a ground ref.
NOTE: If you are using a Simple serial type connection, you will only need a TX from the Arduino to the RX of the motor controller and of couse ground still.
Yard test! Motor burnout? Darn! I got the suspension fixed up and took it for a yard test. Wrote a small program to run a pattern. Well, it streaked across the yard, made some small turns, etc. It was great, zooming around, no apparent problems with power, all six wheels driving.
Then it slowed down and stopped. Battery gone already? I was surprised. Looking at it, the Sabertooth was complaining that there was some issue. I disconnected one side, then the other, and narrowed it down to one of the motors. All the rest run fine, battery was not depleted.
I disassambled the motor and cleaned up the gears. Maybe some dirt from the outside? Seems to run, then grinds to a halt. Stall current is 0.5A… seems like it is getting there. Bummer!
That seems like the same for the 37mm motors I have like them. I have a pair on a bot I’m working on for my nephew. They are the slow boat variety so as not to hurt him with a fast metal bot.
Motor specs They say Hsiang Neng geared motor made in Taiwan 50:1 175rpm DC 7.2V HN-GH7.2-02414?.. I got them from somewhere about four years ago, and I see similar ones but not the exact same RPM. They say 7.2V but don’t budge unless I give them 12V. http://www.lynxmotion.com/p-96-gear-head-motor-72vdc-501-175rpm-6mm-shaft.aspx Might have to get a replacement and watch out for dirt! I guess I need to make some sugru boots or something to protect the motors.