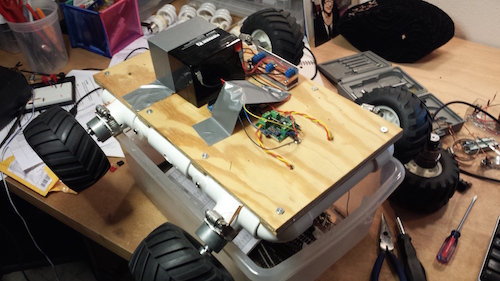
GardenerBot Mark II
Here's my partial build of my six-wheeled GardenerBot. Ideally it will at least drive around the yard successfully! :D Based on the Wild Thumper design idea. Using a Sabertooth 2x5 motor controller and a 12V 5Ah battery. Using an Arduino to provide PWM signals to the Sabertooth.
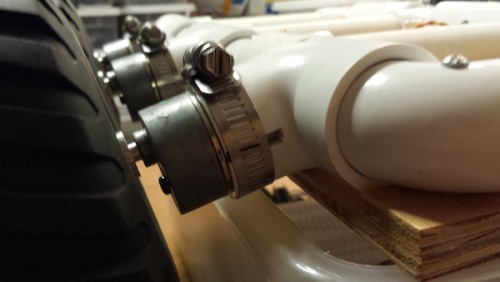
There is not much clearance between the tires. I ended up adding nylon washers to push the front and rear wheels to the outside. The washers rotate on screws, and help maintain spacing between the wheels. It is one way to stabilize the tees as they slide on their mount a bit with this design. I'm still not completely happy with the dimensions due to wheel-to-wheel clearance... a stick or rock between the wheels might jam them.

The dimensions of the robot are more square than the Wild Thumper. I think this would make it easier to use skid steering, as opposed to a long, thin profile, but I'm not sure. It should also make it more stable side to side. Going across a slope for example it should be less likely to roll. I think a Hummer is wider than a Jeep for that reason.
Update: After burning out a motor last night, I was seriously disappointed. Am I overdriving these motors? I throttled back on the speed and changed my marching orders in the Arduino. I went down to four wheels. Now I'm seeing, with the skid steering, that the outside rear wheel tends to fold under a bit. For example, when turning right, the left rear takes the most lateral inward stress and folds under somewhat. I'm thinking I need larger wheels, and more ground clearance. Putting the weight on the middle wheels makes even more sense, but now I've got to order a sixth motor...