galegu
September 29, 2008, 9:32pm
1
Hello,
i am french and i have build my first hexapode. i found lot of informations on this forum.
I use :
ssc32
18 HS475HB
2700 niMh cel pack 6V
200 niCd batterie 9V
I develop a C# program to move my robot through a serial cable for the moment.
Finally it will be automous with a PIC 18FXXX.
A video of my fist movement :fr.youtube.com/watch?v=5AI7eC7D_1M
photos will come soon
galegu:
Hello,
i am french and i have build my first hexapode. i found lot of informations on this forum.
I use :
ssc32
18 HS475HB
2700 niMh cel pack 6V
200 niCd batterie 9V
I develop a C# program to move my robot and a serial cable for the moment.
Finally it will be automous with a PIC.
A video of my fist movement :
photos will come soon
The forum won’t allow links until 24 hours after one link free post. Looking forward to seeing the vids tomorrow. 8)
galegu
September 29, 2008, 9:37pm
3
Ok thank you !
Now the link for my video is ok !
beave
October 1, 2008, 2:55am
4
Nice start! Looks very smooth and alive
galegu
October 1, 2008, 7:05am
5
Thanks !
galegu
October 7, 2008, 3:33pm
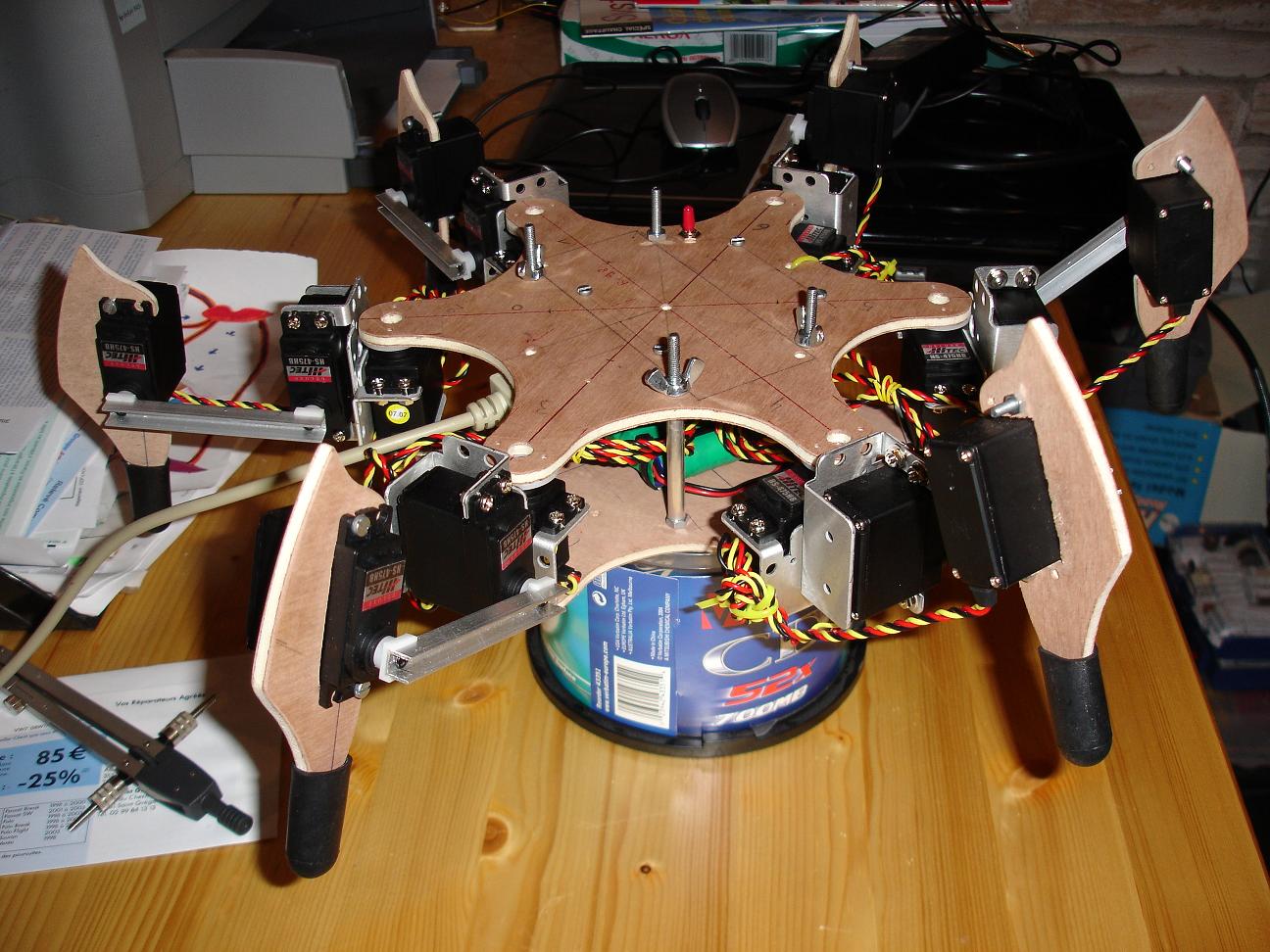
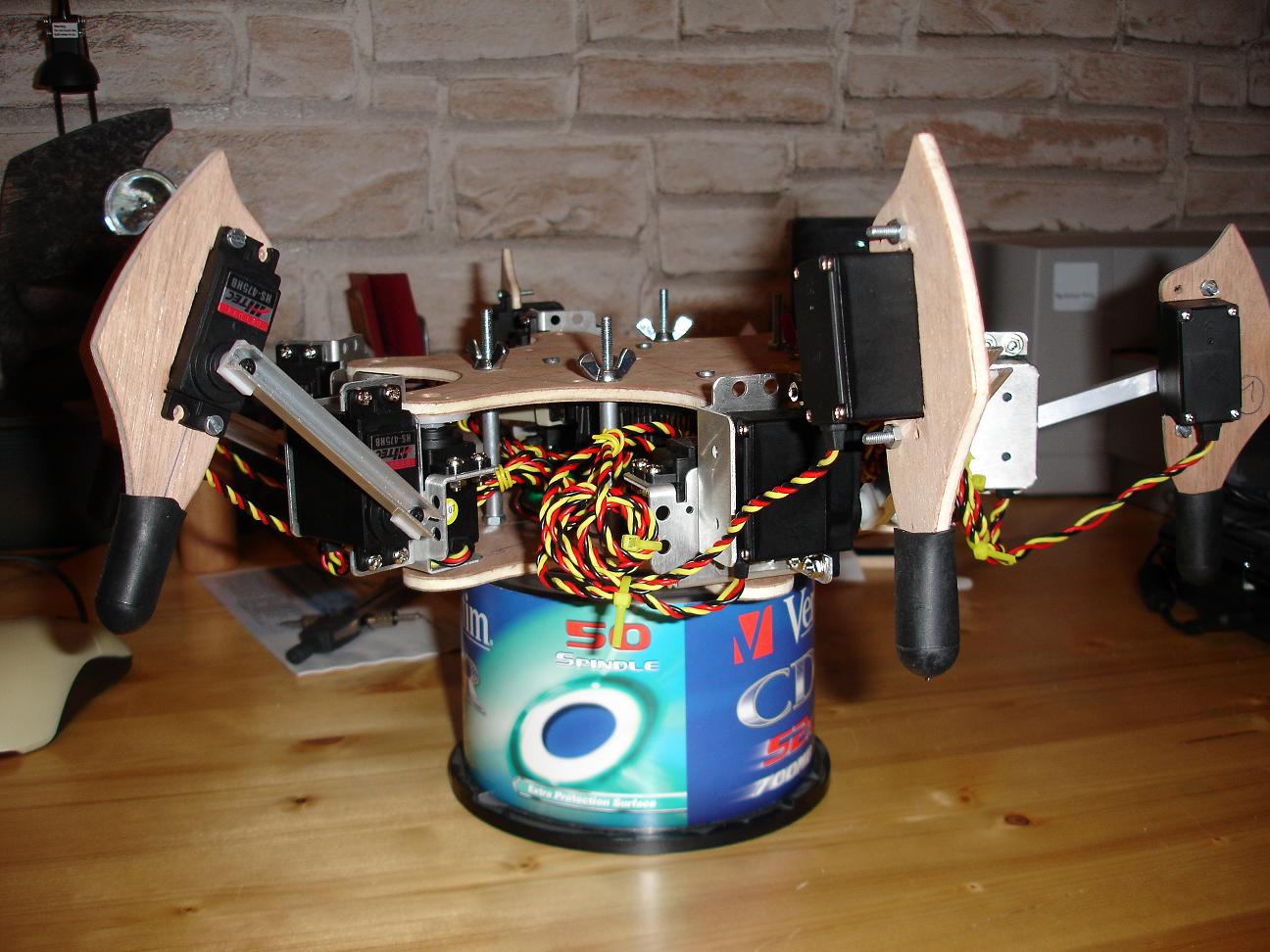
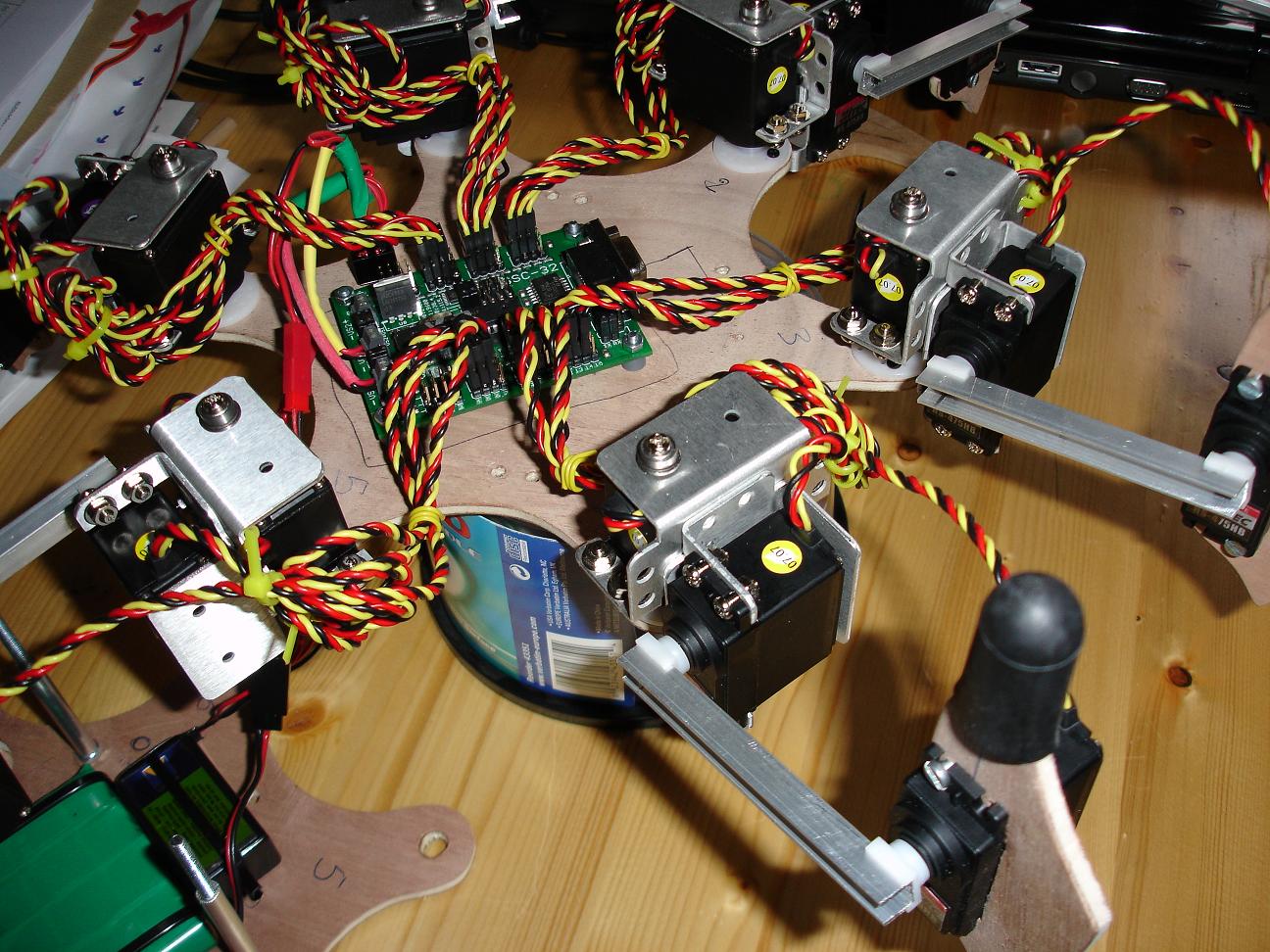
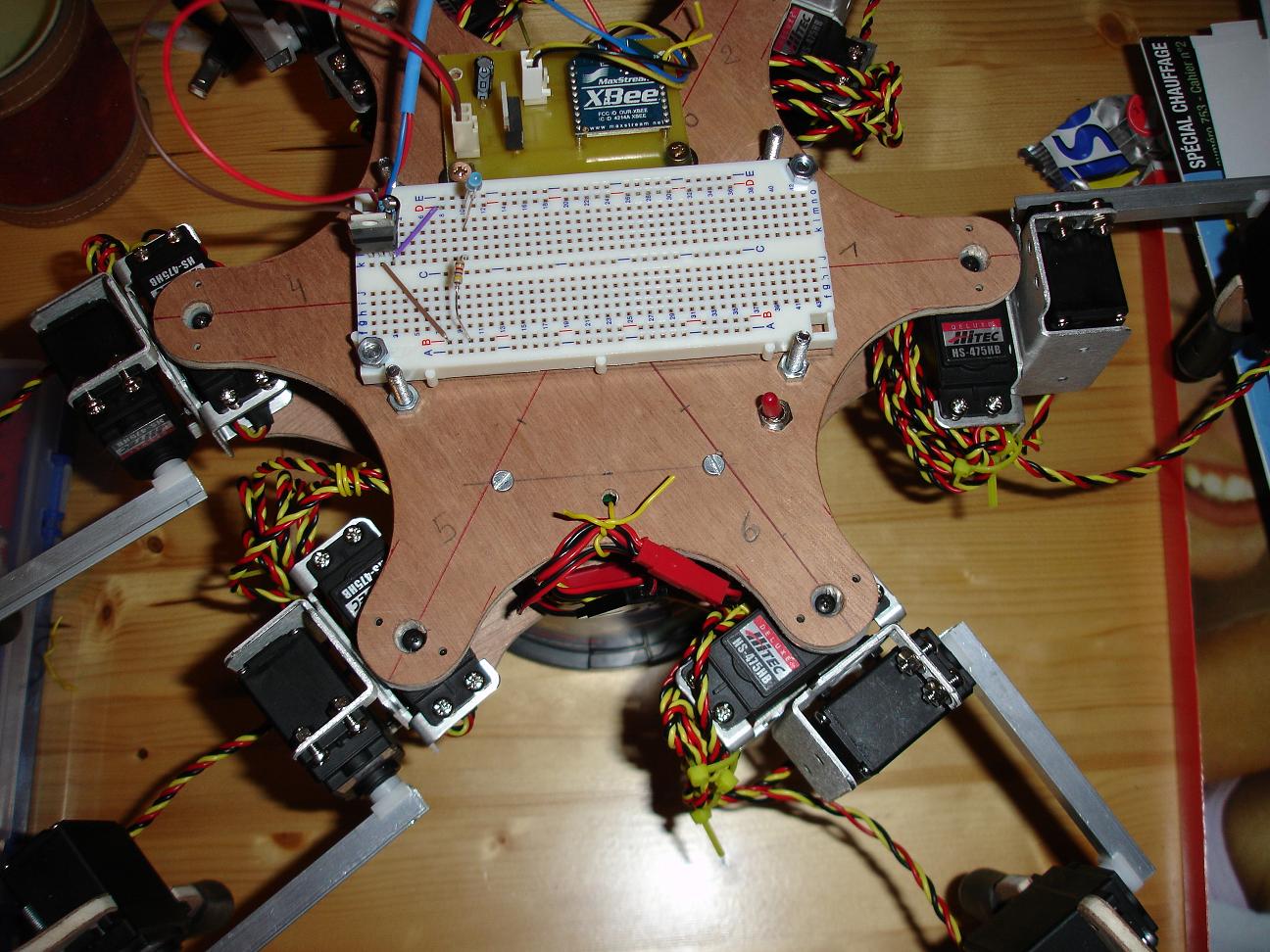
6
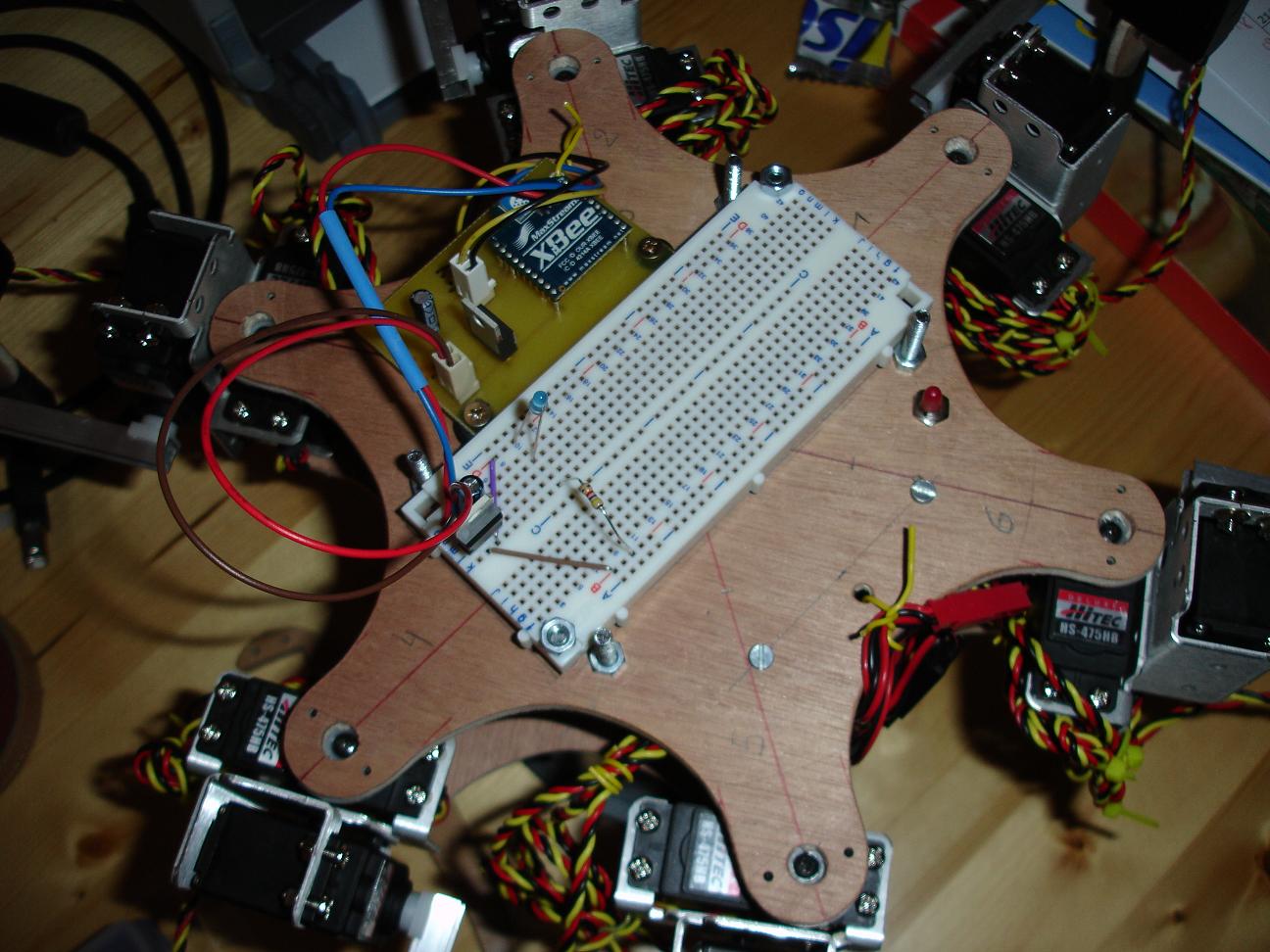
Some picture of my hexapode :
galegu
October 7, 2008, 5:07pm
7
and now a new video :
fr.youtube.com/watch?v=Amo3CJFSBx0
My walk cycle has 8 steps. And hexapode move his body only during 4 steps… I will change that… but i have no idea for the moment.
zenta
October 7, 2008, 6:10pm
8
Hi,
Great work! I like your creative way to make the femur part using an aluminium U-profile and the adjustable servo horn part.
Nice video too!
galegu
October 15, 2008, 8:13pm
9
A picture of my soft control written in c#
Now i have roll, pitch and yaw movement of the body.
My next step is to implement wave gait en ripple gait.
For the moment i have only tripod gait.
galegu
November 17, 2008, 8:13pm
10
I have implemented the follow gait :
Tripod 4
and the balance mode to !
Some video :
tripod 8 steps with balance mode and lot change of direction…
fr.youtube.com/watch?v=yeJiD1sLNuA
ripple 12 steps with balance mode
fr.youtube.com/watch?v=j_Olw-_MQg8
Quad 9 steps with hight speed rotation and translation
fr.youtube.com/watch?v=j_Olw-_MQg8
tripod 8 with balance on then off and on to finish…fr.youtube.com/watch?v=siGQnPUPaYY
Depend of the direction X or Z rotation can be big.
Very nice! How are you interfacing the Wimote for controlling the robot?
8-Dale
galegu
November 17, 2008, 9:43pm
12
For the moment i use my computer with a Bluetooth key. I have c# code source to use wiimote in my control program. Then orders are transmit with xbee module to the hexapode. There is lot of step between wiimote and the hexapode !!