

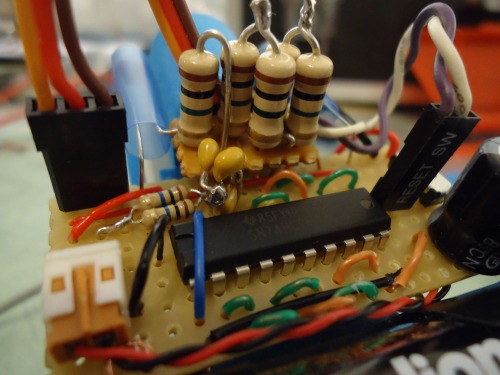
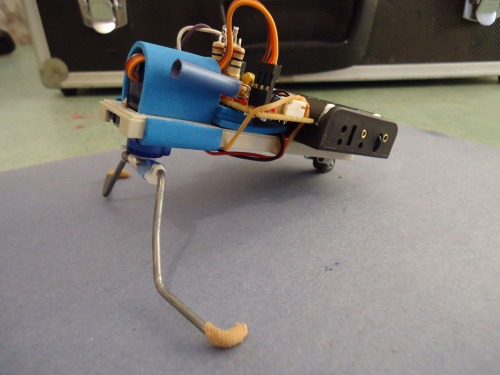
Bored one Saturday, waiting on components for a new Motor Driver for the MicroCore - I decided to 'hack' together a clone/version of Wilf Rigter's uCrawler. I say 'Hack' because if you look close you may be able to tell that I've cobbled together some resistor and capacitor values from smaller values :) Surprisingly it works, although it does have traction problems getting purchase with the feet (I was aware of this limitation in the design however).



All in all I was rather happy with the result as it does exactly what was expected. Still 'tweaking' it since I feel the timing of each step is too fast but I always 'tweak' - even finish projects ...

Little Miss LMR (My 4yr Old) gives it a 2 Thumbs Up.
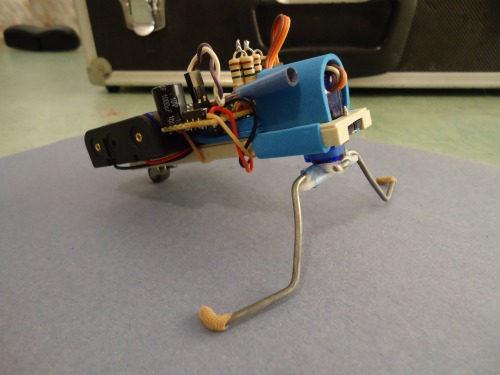
Crawls towards the brightest light source
- Actuators / output devices: 1x HXT900 modified servo
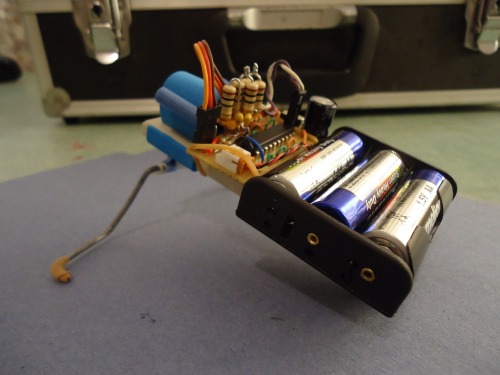
- Power source: 3x AA (4.5V)
- Sensors / input devices: 2x LDR
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/g-ucrawler