Hi @Microcut,
Welcome to the RobotShop community! 
I’ll make the assumption here that your robot arm kit already comes with power electronics (to drive the servos) and only requires you to tell it how to move (step signal) and in which direction (direction signal). I’ll also make the assumption those signals and the home switches are all a typical digital level such as 5 V DC digital signals. If any of those assumptions are wrong please let me know! 
There are a few ways to set this up and it really depends on how you want to go about it. The simplest would be to use a general COM port in your FBS project directly. This is one of the primitive components available in the component bar on the left in the editor.
You can read more about this component in the component reference guide, pages 74-75.
As a general reference I also greatly recommend that you check out some if not most of this guide. It’ll help you understand better how to work with FBS to make apps for your projects. The object is pretty straight forward to use and once the port is open you can simply send/receive data from it directly.
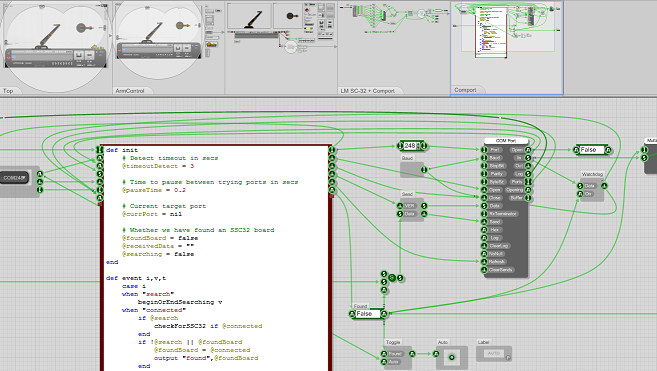
For example on how to do complex stuff with it (such as controlling robots using a set protocol) have a look at the examples under the “Lynxmotion” category. Deep inside the modules you’ll find stuff like this:
From there, you’ll need some code running on your Arduino to control your stepper motor controller(s) and to use your serial communication to receive commands / send feedback.
This is where there are many choices such as implementing your own simple, custom protocol or something more general such as using Arduino Firmata to control the I/Os. You can also find some useful links and info on the (now no longer maintained) Wiki for it here. You can read more about the protocol here and the library here.
Of course, there are plenty of other ways to connect to your stepper motor controller(s). Since FBS allows using external DLLs (more details in component reference, pages 91-92 & user guide, pages 183-203) and HTTP Post requests (component reference, page 166) directly you can pretty much connect any way you want through any interface of your choice.
A common way of connecting to stuff remotely nowadays is with a WiFi-enabled RPi or ESP board that hosts a web server over TCP/IP.
I hope this help you get started on figuring out what direction you wish to take.
Good luck with the project and let us know more with a robot post!
Sincerely,