

FLoeBot was born out of a quest to build something different from what everyone else at my college had been doing for years. I also wanted to build something that would require the use of several sensors all working in tandem and with several options for control. i had also recently discovered eagleCAD and learned how to do surface mount soldering, so this was my first foray into PCB design and SMD soldering. Some credit goes to Oddbot as his work on splatbot gave me ideas on how to implement the fire sensing array and also his idea on using windshield wiper pumps. I had spent several hours online searching for pumps to use in this robot and I could not find anything useful. In the original robot I had used a borrowed pump from a toy heli and boy, it was terrible. Thanks, oddbot for the ideas and a future version of this robot will be implementing your mkIII design using thermocouples, although i plan to use this in combination with the phototransistors as those have better range. The thermocouples will be used to eliminate sunlight based on temperature readings. My original plan was to use the MLX90614 temperature sensors for this robot but their FOV is limited and the robot has to be really close to get a good temperature reading. There are lenses to increase the range but they are just too expensive.
Update: Dec. 29 '13
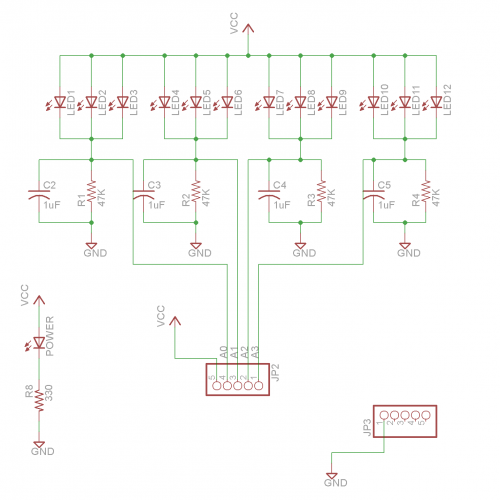
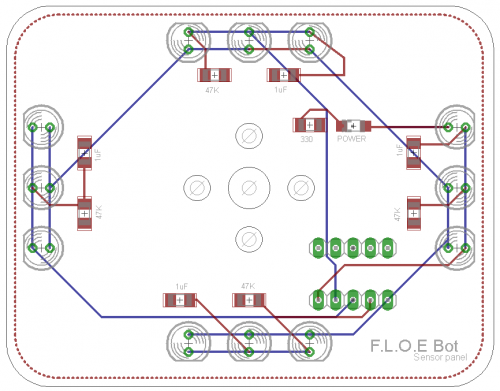
The above schematic shows the design for the fire sensors, I used EagleCAD for the design and for the sensors I used the PT334-6B. I used 47k resistors in series with the phototransistors allowing the sensors to output a value corresponding to the intensity of infrared light detected from a flame. The 1uF capacitor helps to smoothen the output from the sensors. In the next iteration of this sensor I plan to change the resistors to a pot as the resistors I used made the robot too sensitive to infrared light.
Flame detection, Obstacle avoidance
- Actuators / output devices: Servos, windshield wiper pump, tetrix motors
- Control method: Bluetooth, autonomous with manual control over-ride options
- CPU: Arduino Mega
- Operating system: Arduino IDE
- Power source: Turnigy 3S 11.1V 3600mAh LiPo Battery
- Programming language: Arduino C
- Sensors / input devices: Sharp IR, Maxbotix EZ1, PT334 phototransistors
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/floebot-fire-locator-and-eliminator-robot
