

This post is just one of the first steps of my build.
I have made my robot's housing ready for powdercoating.
UPDATE 15-2-2013
Servo's arrived this day.
.
UPDATE 27-2-2013
Old housing in a new colour.

UPDATE 3-3-2013
Today I made some wheels. The rubberband acts as a tire.

UPDATE 24-5-2013
I thought it would be nice to make a sort of prototype first before I instal it in the powdercoated case. This way I can see if I am happy with the sketch and if there are things I would like to chance.
The second video shows the prototype. (It does show a mess of wires and a not so stable wheel. :P)
UPDATE 29-5-2013
I did chance my code a little bit and I like this one better then the previous one.
UPDATE 31-5-2013
Here are some pictures of what I did to make all the components fit in the case.

This connectors should make it easyier to connect the sensor while the arduino is in the case.
The HC-SR04 with the conectors soldered.
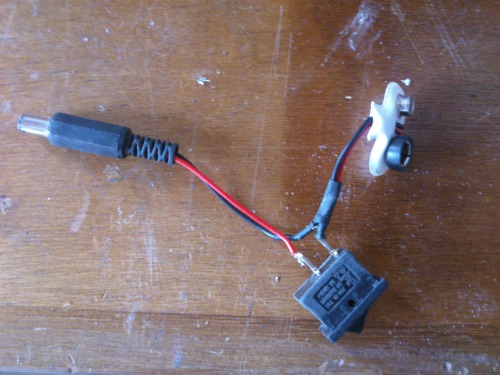
The battery connector and the arduino jack soldered to the switch.

The case with the servo's glued on and some kind of acrylic or something just to make it look nicer.

The ballcastors.
The robot is not finished yet but did finished the code. I hope i can post video's and pictures of the finished robot soon.
UPDATE 7-6-2013
Yesterday I did finished my robot.
Here are some pictures of Hectic:

Sorry for the pictures being sideways. I don know how to turn them. :P
In the last video you will see the finished robot.
Navigate around via ultrasound.
- Actuators / output devices: Servo's and led's
- CPU: arduino uno
- Power source: 9v battery, Battery Pack
- Sensors / input devices: HC-SR04 ultrasonic sensor
- Target environment: indoor flat surfaces
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/first-robot-hectic
 (I am glad to see another Dutchman too.)
(I am glad to see another Dutchman too.)