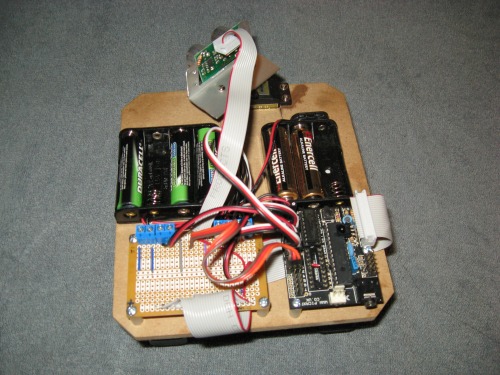
Here's another entry based on Fritz's great code. One goal I had was to not have anything soldered directly to the main board. Instead I installed another board for hard connections and to allow me to expand in the future. I am thinking of this as a great, solid test bed for additional sensors and experimenting with code.
A nice, simple base running on good ol' Fritz code
But really they are just some angle iron… I used 1x1x1/16" aluminum angle. There is a little hardware store here on Cape Cod that has a pretty nice rackof different aluminum pieces -Square tube, round tube, angles and barstock, it is wicked expencive bu when you only need a little it is worth it. It drills like a dream and you can cut it with a regular chop saw (safety glasses!!)