

If you're a FaceBooker, please visit Fiji Water's page (http://www.facebook.com/fijiwater) and "like" Fijibot! It was posted July 11th.
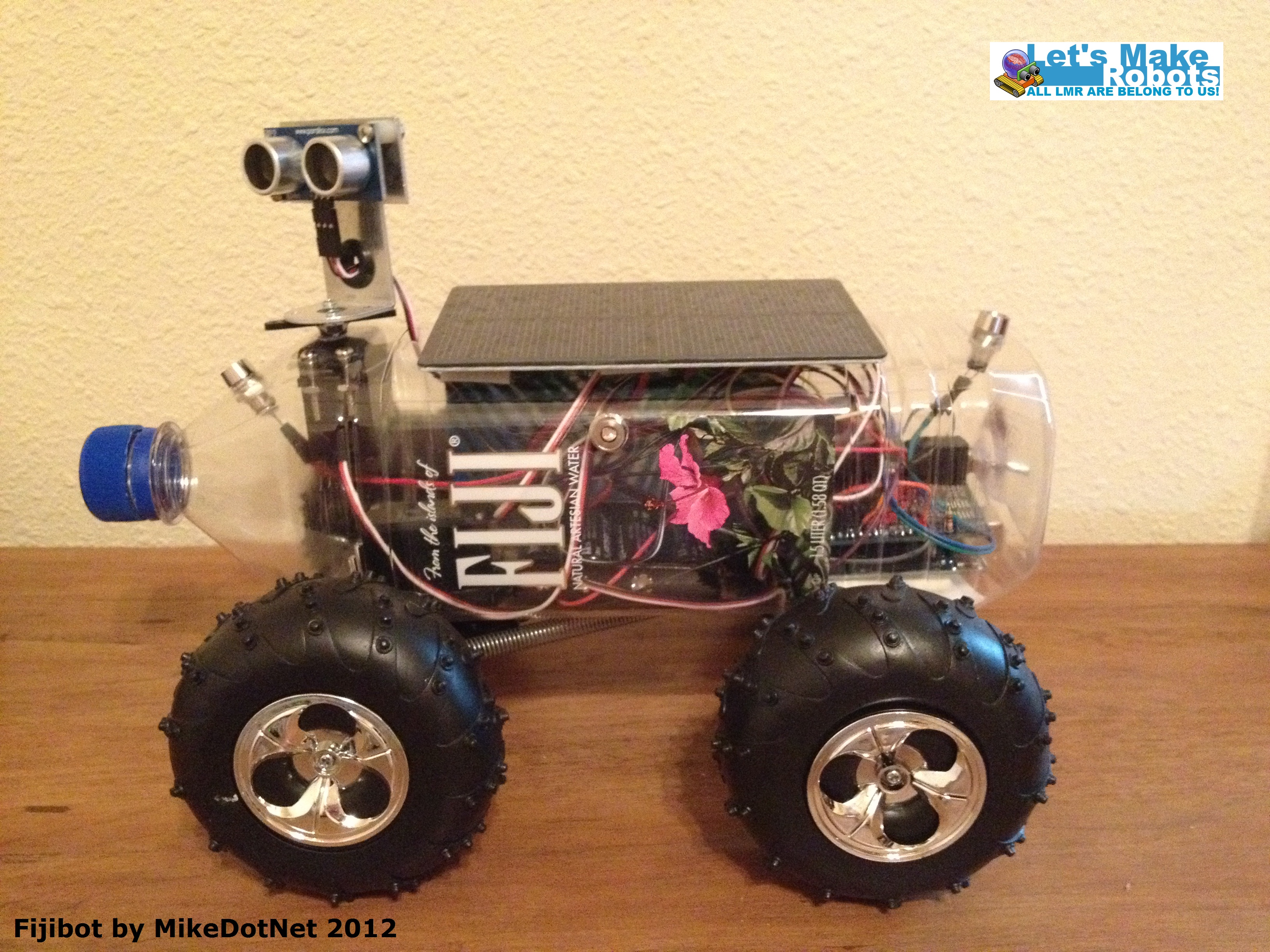
Fijibot is an autonomous, self-charging photovore. I built him using a 1.5 liter Fiji Water bottle, an Arduino Uno, 6v solar panel (plus various other parts) from Radio Shack, an Arduino Proto Shield (plus various other parts) from Adafruit, and the wheels and steering arrangement from an RC car.
I decided to use a Fiji Water bottle as the robot's exoskeleton because Fiji Water is an environmentally concious company and Fijibot recharges its batteries via a solar panel. Plus, I think the round-edged rectangular shape and the (see through) clear bottle make a really cool looking robot!
I used the Arduino Uno for this robot because I think it's an awesome microcontroller for small projects, I enjoy programming in C language, and my local Radio Shack has a good selection of Arduino boards and shields.

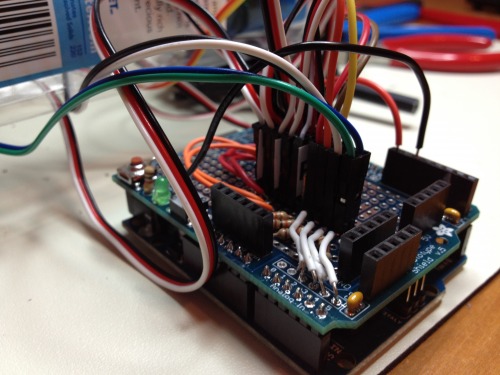
Working in the tight space of the Fiji Water bottle, I decided I wanted to be able to easily connect and disconnect everything (sensors, servos, etc.) from the Arduino board. So I purchased a Proto Shield, male breakaway pins, and 6" female/female jumper wires from Adafruit. I soldered the pins to the proto shield and hooked up everything with jumpers!
Fijibot's main mission is to find "food". His food is light to charge his batteries via the solar panel on his back. I used four photoresistors mounted in LED holders (front, right, left, and top) to help him find the brightest spot in the room. The main program loop compares the values of the four resistors and moves toward the most light. Once he's found the brightest spot (his top resistor sees the most light), he stops and enjoys the free meal!
While looking for light to charge his batteries, Fijibot avoids running into things using ultrasound (via a Ping sensor). The main program loop is constantly checking for obstacles within a specified range (30 inches). If something is detected, Fijibot stops, looks left and right (using a standard Parallax servo), and decides which direction is clear. If he's blocked forward, left, and right he will backup for half a second and try again.
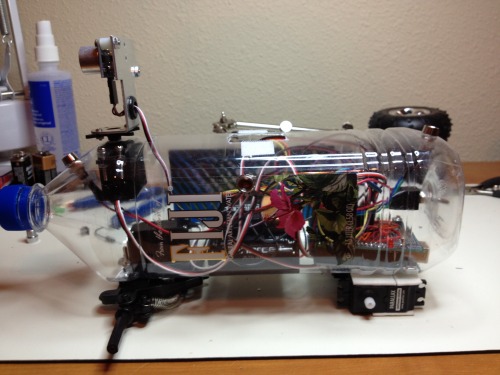
Fijibot includes four servos: one continuous server for each rear wheel, one standard servo to turn his head (the Ping sensor), and another standard servo to move the front axle left or right for turning. I hacked the wheels and front-end turning mechanism from a cheap RC car. I had a hard time with the front-end and eventually had to add some tension springs so he would go in a relatively straight line.

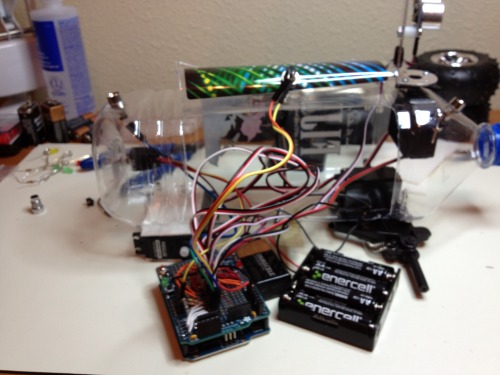
In order to run the four servos and the Arduino, I used two separate power supplies. The Arduio runs on a 9v battery connected to Vin. The four servos and the Ping sensor run on a 4-AA battery pack, which is wired in parallel to a 6v solar panel for in-circuit charging. Since the solar panel and battery pack are closely matched, all I used was a schottky diode in the charging circuit. I ran both power supplies through a DPST switch so I can power him off completely, but still leave the solar panel connected to the 4-AA battery pack. This way he can chage his batteries even when not in use.
More Fijibot Pics!


Seeks light to charge batteries (photovore) and avoids obstacles
- Actuators / output devices: 4 servos
- Control method: Full autonomous
- CPU: arduino uno
- Power source: 9V+6V
- Programming language: Arduino C
- Sensors / input devices: Photoresistors, Parallax Ping)))
- Target environment: indoors/outdoors/small areas
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/fijibot-now-on-fiji-waters-facebook-page
 Nice idea but
Nice idea but