Hi
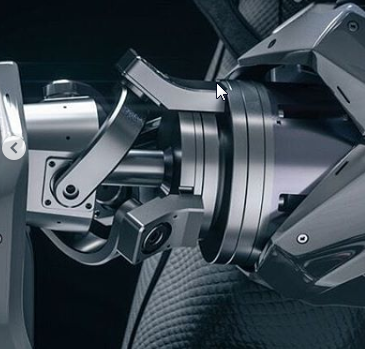
Does anyone know what this thing is called? I think I understand how it works but I’d like to learn more about it.
There’s probably a ball joint in the middle and 3 cylinders on the right, each attached to a different arc shaped arm and controlled by a different actuator.
Together it looks like it can rotate and tilt in any direction.
https://www.robotshop.com/forum/download/file.php?mode=view&id=8263&sid=e9081e086420437c7b38d5db39f86969
Hi Arthurio,
This look like a “swashplate” commonly used in helicopter rotor.
Wikipedia: Swashplate (aeronautics)

Good guess but I don’t think that’s it.
I like how much of the weight rests on the ball joint while the rest of the stress might be pretty evenly distributed between the 3 actuators. Also because of the cylinders and the 90 degree angles the force is sort of applied by twisting which means the arms have to be very stiff but it allows moving the motors much closer to the center of mass. Looks very clever and cool and it might just work for my project.
I guess I have to just design my own and wait for the patent lawyers to come after me because the designers of this robot concept aren’t replying to my question either.
Anyway it might be really fun to play around with.
Going to model some hardware in CAD to get this ball rolling.
I don’t have the right kind of ball bearings for this. I think I’d need thrust bearings but I’m gonna try anyway.
The ball in the middle is a solid steel ball bearing fashioned into a doorknob originally but I think this will make for an excellent ball joint. Sort of like a cherry on a cake.
https://www.robotshop.com/forum/download/file.php?mode=view&id=8274&sid=d5fd3b50df6f7ab7a053ae19bb1b12e0






