

I found this amazing tutorial that breaks down Path Planning so even *I* can understand it.
I thought many of you might appreociate it and the other links I have added here.
I started this research with the goal of stealing ( err... borrowing) some existing Python path planning routines. My python expertise is a LOOOOOONG way from solid.
If like me, you are trying to wrap your head around Python as a language , I strongly encourage you to look up Trevor Payne - on youtube. He has a weekly series on Python, that starts basic, but has got into some very advanced topics as of late...
Which brings me to.... A* Robot Path Planning
From: http://correll.cs.colorado.edu/?p=965
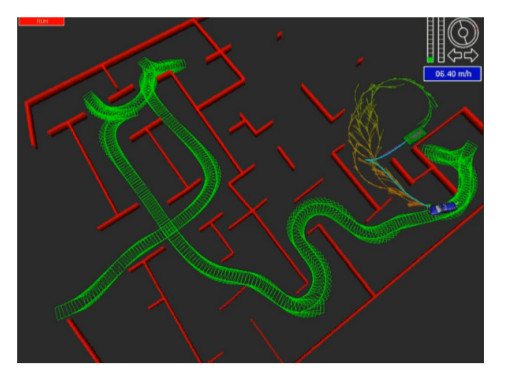
https://www.youtube.com/watch?v=ob4faIum4kQPath-planning is an important primitive for autonomous mobile robots that lets robots find the shortest – or otherwise optimal – path between two points.
Otherwise optimal paths could be paths that minimize the amount of turning, the amount of braking or whatever a specific application requires. Algorithms to find a shortest path are important not only in robotics, but also in network routing, video games and gene sequencing. Path-planning requires a map of the environment and the robot to be aware of its location with respect to the map. We will assume for now that the robot is able to localize itself, is equipped with a map, and capable of avoiding temporary obstacles on its way.
