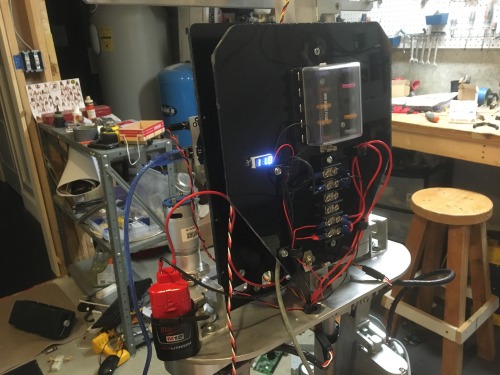
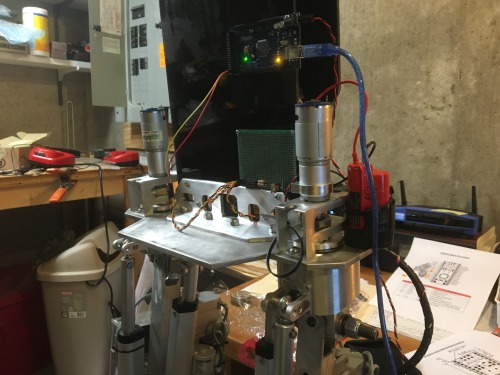
Hello, I just joined this sight to learn and meet people that share the same interest in making robots. I know no one that does this as a hobby. I am working to get it to move forward and turn left and right. I am currently working on a program now to do so. Programing is my weak point, I am no expert in any thing really. Trying to learn all I can. I have a mega as the main controller and 13 arduino nano's. Each nano is devoted to one linear actuator or motor for controlling movement and feed back. I have connected them all through I2C. The movements for walking seem to get the job done but fine tuning the smoothness takes time and getting more familiar with the c++ language. If any one has suggestions or know of a builders club in Maryland I would appreciate it. Thanks
It looks really amazing. I hope you post a lot more pictures and video.
If there is anything I can help with on the programming side, I will. I doubt that my experience overlaps though with what you need just yet, as I work mostly on verbal, vision, personalty, and learning stuff. I would think that getting some orientation sensors / gyros on board so you can tell position of body relative to ground would help.
Are the actuators fast enough to react if the robot starts falling or moving in some unexpected way? What actuators are you using?
Very nice robot cant wait to see more pictures I,m very interest in your I2C setup I use I2C on my robot http://escaliente-robotics.blogspot.com.au/ but if I have the controllers to far apart it becomes unreliable
Thanks for the input. The actuators “serco city 25 lb. @ 2’’ per sec.” are not as fast as I like but the ones conected to the hip joint are leveraged enough to move quickly from the standing position. In a power movement they are slow as in a squat. i will try to post a video.
I have started to look around for vision componets and sowftware. I have used Roborelam to track a ball in a old project. Do you have any sugestions or what direction to go?
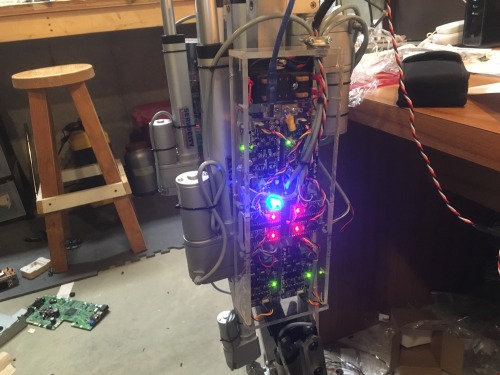
The I2C setup is braided servo cords with the black wire conected to ground. I printed a circuit board to tie 4 nanos togather and conect the 2 boards to a hub. The runs are no longer then 24’’. i have only had one glitch out of 100 or so tests from the master arduino. The actuators move @ 2" per sec. I have the leverage points so the move at a decent speed from teh hip joint.
I looked at your bot and was super impressed. I was looking at yours and see you used geared motors. How do they do for your bot?
The geared motors work OK they were very cheap and have good torque BUT you get what you pay for a higher quality motor will make it better. The whole gearbox set up is very basic and can use some improvements like bearings, higher resolution encoders stronger motor drivers that is what i have in the next model the encoders have 12 bit resolution. The cheap motors make tuning the PID loop hard so precision suffers.
Using ROS and MoveIT I can move the gripper the to the object with the correct orientation but the wiring at the back is a real concern I have to seal the electronics and reduce the wires to make it reliable to that end I put the controllers on the gearbox and make it modular this keeps all the wiring runs short but I2C will not work over that distance so now I have started to use rs485 instead
Your bot is about the size of an InMoov and much larger than mine. I started building one but got sidetracked and built Ava instead. I’d consider using what InMoov uses…video cams in eyes and a 3D Depth - Kinect Sensor in the chest. Complicated stuff that you could spend years writing code for, however a lot of people have written and are writing code for it.
My bots, which are only around 18in tall, use a video cam (on a phone) with OpenCV, a thermal cam, and a PixyCam. Each have their advantages. For example, the PixyCam is really good at tracking many objects (by color) at the same time 50 times a sec. The thermal cam is good at tracking people, pets, fire, coffee, windows, or air conditioner vents. The video cam with OpenCV library is good because you can write anything you want, find faces, colors, edges, whatever, or even add OCR, but it is slow. Fusing all the data together from multiple sensors and/or processors and deciding what to do will be a challenge, I might be able to help with that.
How long have you been working on this, is this your first bipedal project, have you been working alone on this or with others, have you access to fabrication tools or using openbuilds/openBeam type stock materials & have you found it expensive or affordable to get to the point you’ve reached so far???
Sorry for all the questions but I’m simply awe-struck with your build & CANNOT WAIT to watch the progression of this build!


 Hello, I just joined this sight to learn and meet people that share the same interest in making robots. I know no one that does this as a hobby. I am working to get it to move forward and turn left and right. I am currently working on a program now to do so. Programing is my weak point, I am no expert in any thing really. Trying to learn all I can. I have a mega as the main controller and 13 arduino nano's. Each nano is devoted to one linear actuator or motor for controlling movement and feed back. I have connected them all through I2C. The movements for walking seem to get the job done but fine tuning the smoothness takes time and getting more familiar with the c++ language. If any one has suggestions or know of a builders club in Maryland I would appreciate it. Thanks
Hello, I just joined this sight to learn and meet people that share the same interest in making robots. I know no one that does this as a hobby. I am working to get it to move forward and turn left and right. I am currently working on a program now to do so. Programing is my weak point, I am no expert in any thing really. Trying to learn all I can. I have a mega as the main controller and 13 arduino nano's. Each nano is devoted to one linear actuator or motor for controlling movement and feed back. I have connected them all through I2C. The movements for walking seem to get the job done but fine tuning the smoothness takes time and getting more familiar with the c++ language. If any one has suggestions or know of a builders club in Maryland I would appreciate it. Thanks