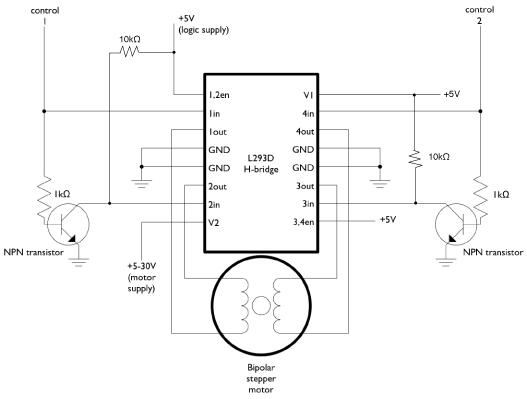
Question: Is it correct, that when I solder the following circuit there are only two pins nessessary from the microcontroller to the L293D to drive a unipolar stepper motor ?
Answer: Yes. That is correct.
Question: Are the two NPN transistors and the 10kOhm pull-up resistors responsible for the signal inversion?
There is a lot of information about the L293D on LMR and the web. But somehow I'm still unsecure if this circuit makes it possible to drive the stepper motor with only two control cables from the microcontroller to the L293D.
The stepper motor I use is the 28BYJ-48. With this stepper motor you need to make the following wiring:
There is a nice complement IC that creates the needed pulses for the L293. It’s name is L297. You feed it Direction, Step and other settings like full step or half step if I remember correctly.
Regarding your schematic, it seems correct and I think it will work fine.
After I have soldered four drivers I found that only two of them run fine. Two others not. One shivers the stepper. One does nothing.
While I was certain that it is my fault due to a solder failure (that I have not found) or a damaged H-bridge (that I have changed but got the same results) the LMR mogul pointed out that there might be indeed a conceptual problem with the circuit that is shown above (not the one from maxhirez).
So here is our shoutbox conversation (read from bottom to top, bottom is oldest, top is newest):
If voltage (aprox. 7V) is applyed to the circuit that does shiver the driver motor then I see the following measurements:
1in = 0.55V 2in = 1.28V 3in = 2.29V 4in = 1.61V
If the same voltage is applyed to the working circuit this is the results:
1in = 0.54V 2in = 1.16V 3in = 1.91V 4in = 1.44V
As far as I understand LOW should be around 0V and HIGH around VCC -1.5V (that is due to the voltage drop in the L293D (see disadvantages here)) so this should be 7V-1.5V= 6.5V.
"Drivers are enabled in pairs, with drivers 1 and 2 enabled by 1,2EN and drivers 3 and 4 enabled by 3,4EN. When an enable input is high, the associated drivers are enabled and their outputs are active and in phase with their inputs. When the enable input is low, those drivers are disabled and their outputs are off and in the high-impedance state. With the proper data inputs, each pair of drivers forms a full-H (or bridge) reversible drive suitable for solenoid or motor applications."
Here is the conversation from the shoutbox:
merser: perhaps you should connect a dc motor to the circuit the way I have to see what I mean about the continual drive with en tied
According to the page NilsB needs to drive his two pins with 1 0, 0 0, 0 1, 1 1. Further down the page states that the previous order is half out, or, 0 1, 1 1, 1 0, 0 0.
I looked at the “Further Reading” on your actual machine post. You show an image from the datasheet on your stepper motors. Your stepper motor wires are numbered differently from the page I linked to above. Pink and Orange will be either 1 and 2 or 3 and 4. Yellow and Blue will be 3 and 4 or 1 and 2 in that order.