

These servos seem to work well in general, but I need to know if coreless servos are more or less vulnerable to the peculiar leg design of the Phoenix, and by roughly how many grams. Thanks.
@friesz Welcome to the RobotShop Community. The suggested servo is the Hitec 645MG which offers the following max torque:
- Maximum Torque Range oz. / in.: 107 ~ 133
- Maximum Torque Range kg. / cm.: 7.7 ~ 9.6
The 5585 theoretically bas a maximum of 236 oz-in or 17Kg-cm, which is above the 645MG.
https://www.robotshop.com/ca/en/hitec-hs-5585mh-servo-motor.html
Therefore yes, since the servo can provide more torque, the 5585 can theoretically support a heavier robot.
However:
-
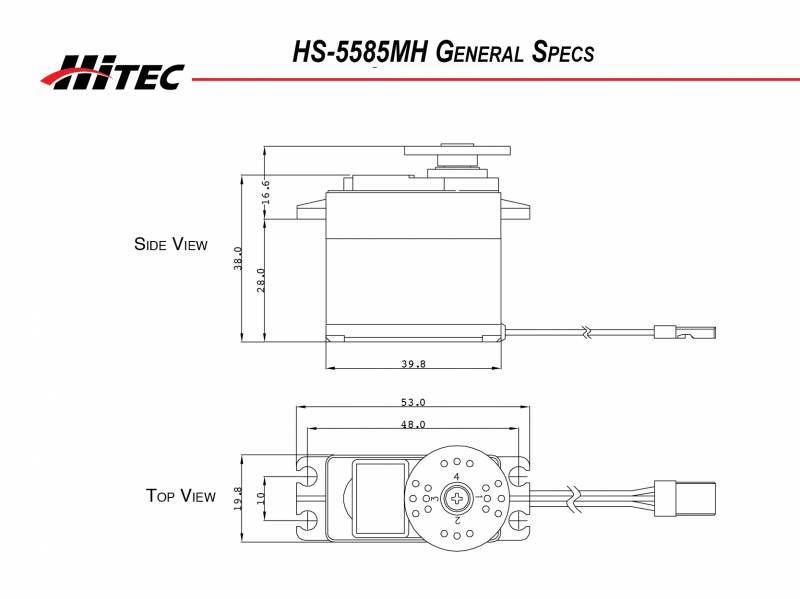
The dimensions of the 5585 seem close enough to the 645MG that it should fit the brackets, but without testing, we cannot be 100% certain.
https://hitecrcd.com/images/products/full/160_1_800x600_General_Servo_Specs4.jpg
https://hitecrcd.com/images/products/full/136_1_800x600_General_Servo_Specs9.jpg -
As you indicated, the Phoenix design is not meant to be a workhorse since the legs are supported entirely by the servo’s output horn. This means that a heavier load will cause more stress at these points.
-
Given how the torque needed at each joint varies based on how it’s walking and what legs are in the air, determining the payload increase is not easy. You may just need to test, and (physically) check the servo’s heat generation to know if there’s a problem.
{kind=link}
{kind=link}
If you want a similar robot with increased payload, you might consider the T-Hex whose joints are all supported by ball bearings on the opposite end of the servo horn.
https://www.robotshop.com/ca/en/lynxmotion-t-hex-3dof-hexapod-robot-kit-hardware-only.html
Thanks for the quick response and abundance of very useful information. (By the way, I did check the fit. The hs-5585MH seems to fit the brackets, provided that the bearings are reversed.)