

I first dreamed of building my own robot over 4 years ago and ordered some parts. Then I realized that I had no idea what I was doing. Years later I have got my first platform on the way. It currently has a self designed h-bridge and a 5v regulator. Soon I will be adding an AVR to it once I get to planning a motherboard for it. Before I get to design a motherboard I need to figure out a few things, like wich port do I want to use for driving the motors etc. Also goes to mention, that autonomy is not my goal with this project. I want to draw the line between videogames and reality. Meaning, that my ultimate goal is to make a self contained ROV wich could be driven anywhere in the world (picture a mars rover on earth :)). That goal is far, far, FAR in the future. My current goal is to hook this thing up with an rc reciever and have sensors to aid steering.
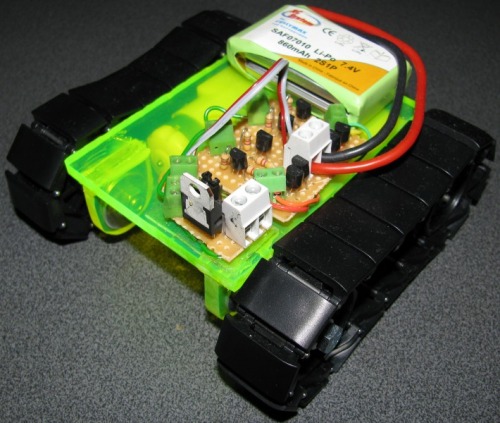
PROTIP: doublecheck before hooking voltages. I blew a 5v reg due to recklessness during soldering and hooked 7.4v to ground and ground to input. Thus that black smudge next to the regulator.
The platform it self is 5mm green acrylic. They are cut with a rotary tool and held together with hotglue. lasercut and polyweld would be nice but right now is more important to get a working platform. We'll see how v2 will be built, but that's not important, since v1 doesn't even have a brain yet :)
I don't know when I will be updating this project since it is currently on hold untill I get an other project completed (alarm clock).
17.3.2011
I've done several upgrades to the platform
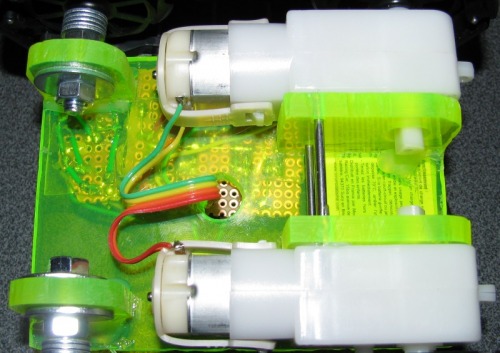
including mounting the brackets for the motors and tracks with screws, building a brain from an atmega8 and a L239D. Last week I finished building a sensorbar for line detection from comparators and photodiodes.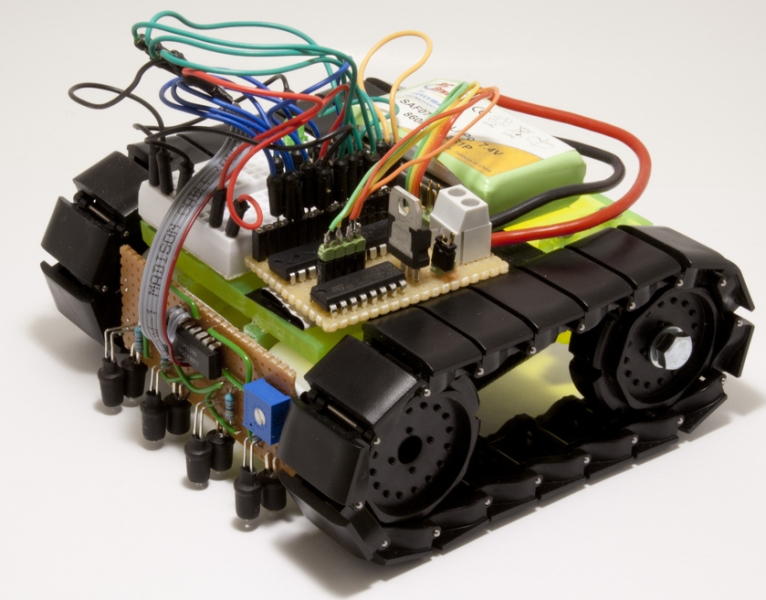
It also seems like the GM9 gearmotors used in this platform cant take handle long runs too well. While testing the platforms battery-life (3.5 hours btw.) the left side motor started slipping. It might be because I accidentaly caused the motor to stall once (there should be a "built in clutch" according to solarbotics).
I've also noted, that the platform is way too small for any real work. So it seems, that I will be designing a new platform soon. Most likely with 4 seperate wheels wich can be seperately rotated with servos.
A platform with movement capabilities for experimenting with microcontrollers and other electronic parts
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/dev-platform-v1-1

