

So this is my first real Arduino robot project. I resisted using the Arduino for some time other than using it as a signal source back to a PC from a sensor. One morning I woke up and just decided I am going to give this a try and see what it is all about. The only thing I can say about it is, I wish I had done it earlier. So enough of that lets get onto the bot details. The main board is a Arduino Uno. The bot has a voice and does talk, the board it uses is the DFRobot Voice Synthesis Shield. You can purchase the board here: https://www.robotshop.com/en/speech-synthesis-shield-arduino.html
The other board it uses is the DFRobot Rover Shield, used to drive the geared motors. You can purchase the board here: https://www.robotshop.com/en/dfrobotshop-rover-mobile-robot-shield.html
The drive system is two small geared motors. You can purchase the motors here: http://www.ebay.com/itm/Small-Smart-Car-Model-Robot-DC-3-6V-GearMotor-Rate-1-48-Biaxial-TT-Motor-/321624211428?epid=505403538&hash=item4ae24bffe4:g:FxMAAOxyNo9StAKt
I am using two different sensors for obstacle and distance.
The first sensor is a ping sensor. It points down at the ground, checking to see if it has reached the edge of the desk or table. You can purchase the sensor here: http://www.ebay.com/itm/5X-New-Ultrasonic-Module-HC-SR04-Distance-Transducer-Sensor-For-Arduino-Robot-/321923116648
The seond sensor is a Sharp Infrared Distance sensor, it points forward looking for any obstacles in the way. You can purchase the sensor and wire here:https://www.robotshop.com/en/sharp-gp2y0a21yk0f-ir-range-sensor.html
The tires I used are not designed for the gearbox I used. The size was what I wanted and the style was what I wanted so they had to be modified to work and the work great. You can purchase the tires here:https://www.robotshop.com/en/dfrobot-wheel-42-19mm.html
The round platform is one that I made from 1/4" PVC. You can purchase the PVC sheets online through McMaster Carr. You can purchase them here: https://www.mcmaster.com/#standard-pvc-sheets/=19mflu9
The body of the bot which is clear and allows me to print a skin and apply to it, is made from a A&W Root Beer 2 Liter plastic bottle.
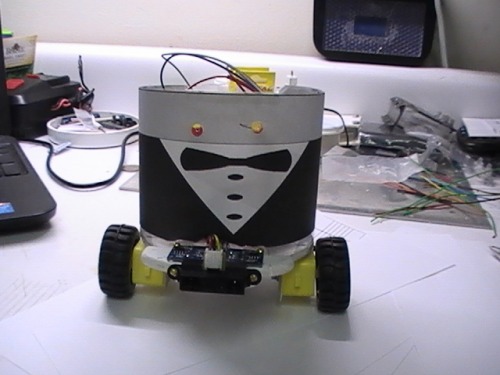
I am also using 2 Yellow LEDs for the eyes.
The bot will roam around on a desk,table or tile floor and when it detects an object will stop and has his own little bot language that he talks. The bot will then backup and then turn and go forward.
I will be posting a video soon.
Thank you much for reading the post.
Special Thanks to my friends Francisco and OpiDopi for their help and guidance on understanding the language that the Arduino uses and to CBenson for his great help and support on products.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/desktop-bot