

We are currently working on the new version of our BeagleBoard-xM based robot. The main reason for redesign was the lack of wheel encoders which prevent us from developing more sophisticated navigation algorithms. That is why we decide to use Dagu Rover tracked chassis. However, not all our electronic could be fit in to the chassis, hence the need for additional enclosure on top of it.
After couple of experiments with standard plastic boxes, we decide to design and 3D print our own custom enclosure. The following pictures are the very first concept ideas developed by great 3D designer Sungreen, who also developed 3D model for our cockpit application.
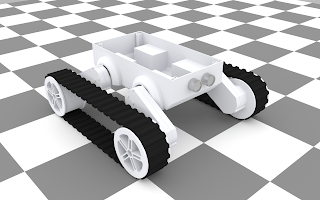
3D model of the Dagu chassis
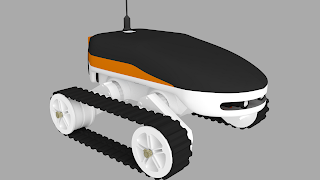
Concept enclosure on top of chassis
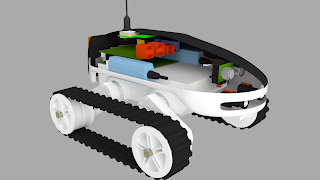
We need to place BeagleBoard and other parts inside
It is surprising how hard it is to find precise mechanical drawings for typical hobby electronic parts. Neither BeagleBoard, nor ultra-sonic range finders as well as many other components have mechanical drawings which are easy to find in the Internet. So currently we are measuring and drawing sketches for all our mechanical and electronic components. As soon as we are done, we hope that our 3D printer will arrive and we can start experimenting with it. So stay tuned if you like to see how the enclosure will finally looks like.