

This is an Idea I've had and I'd like to know if people think it's possible before I spend loads of money ;-)
It's based on a Hubless Wheel.
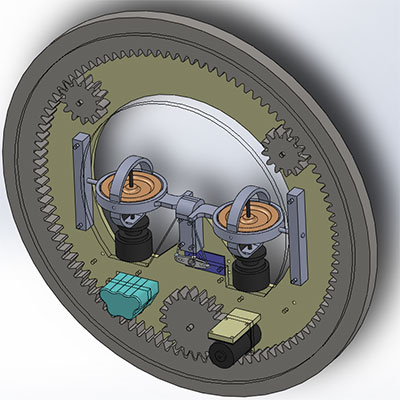
So the Motors are in Black, and the two Gears you see on the cover image will be linked by a chain. The bottom motor will drive the internal 20tooth gear with that chain, which will turn the outside Wheel (with 100teeth). The Whole internal Hub has most of the weight on the bottom so gravity will help it stay centered as the outside wheel rotates.
The two other motors spin two Gyroscopes (metal disc's with a fair bit of weight, bronze colour) in opposite directions creating a lot of Centrifugal force. This force in theory should also help keep the Hub stationary as well as balanced.
Now for steering...
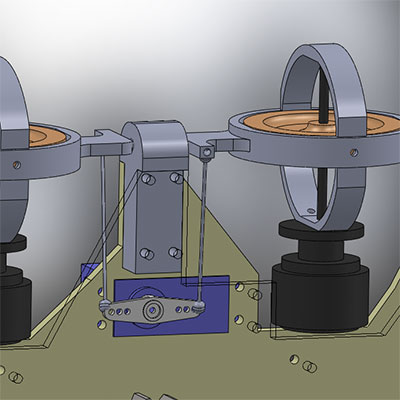
The Two gyro's are mounted independently only by a bar from the middle (grey) block to the outside of the hub and will be able to rotate from this axis. A servo in the middle will have rods attached from each end of the horn to the gyros. When the servo turns it'll rotate both gryos in opposite directions spinning the whole wheel in place, eg this Bike wheel.
I was thinking to making the frame either...
A) buying a cheap wheel, ripping the spokes out and glueing a timing belt to the inside, then using timing pullies for the gears
or
B) getting it laser cut from two bit's of 5mm acrylic with a 3mm plywood inbetween (13mm in total width) for added strength.
The Whole Wheel has a diameter of 37cm's in this drawing.
The Electronics haven't been included in this drawing (to hard for me), but it would be run off a Atmega328. the two gyro motors don't need speed control and only have to run at full speed. I was thinking of using a relay to control each one of them, powering up one first then the other, as the motors would draw loads of current to get started.
And if I manage all that, then adding sensors and what ever else :-)
Note: I'll try make the gyro discs as big as will fit.
Now... Does Anybody think it's possible to make? or am I just crazy? ;-)
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/cyclone-the-one-wheeler

