

Let it be known to the world that letsmakerobots.com is a very live community indeed!
Here is the harvest for the past couple of weeks.
This week we saw the creation and population of the scary user map. Some sixty-plus users are now visible on the map (with varying degrees of accuracy).

mintvelt demonstrated with Edward that a lot of “robo personality” can be added with just one extra degree of freedom. The neck of his robot was fitted with a second servo, so that it can look up and down. A lot of humanoid expression comes from that one little gesture: nodding. So it was agreed in the reactions on Edward’s page.
clcheunhk, one of the many new members this week, surprised us all by posting four ongoing projects in rapid succession. And what an amazing robots these are. With awe, respect and a little envy, we admired a working biped (well, up to the waist, but that still counts) plus a living room radar station (soon on two legs) plus an arm with eyes plus a voice controlled battle tank. CL knows his robots and showed a lot of willingness to share. Bravo!

chris (the carpenter) needs to build a BIG motor controller, so he asked some of his "lmr homies" for advice. He got more than he could chew, but he loved it anyway. "MORE SCHEMATICS", he yelled in ecstasy. And that's what he got. grog started to write down all the discussed variations to this very common theme in a "walkthrough page".
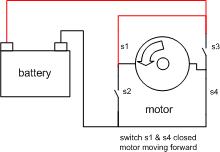
He meant for that to become some sort of LMR wiki that we all can contribute to, but for that you need a "component page". Maybe the webmasters can help him out with that. Look for the page called "H-bridge matrix".
hmn44 mentions he owns a lawn mower that he wants to operate completely autonomously. He needs some sort of beacon assisted navigation that is not depending on (just) GPS.
This is a very specific application of a very generic problem in (outdoors) robotics. And for that very reason I am very keen on helping mike. If only because I can let him investigate my crazy ideas, not unlike chris and his H-bridge. I trawled the google database today and I am all fired up to flood his forum thread with fresh URLs.
captain tuna (the one with the :Pipe hanging from his thin blue lips) caught a "Super Capacitor" in his internets and incited a flurry of ideas (and fantasies) about what to do with them. Not all of them were equally realistic. I just hope that someone in that forum thread will put the pedal to the metal and give us some real life benchmark reports.

ant decided he would give his servos a good try before mounting them onto a robot. He built a servo writer that can write "LMR" on the wall.
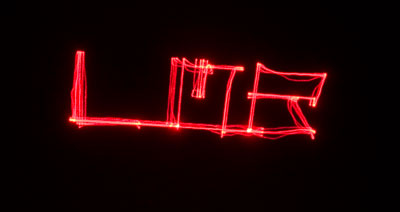
His report, with lots of pictures, resulted in numerous followers.
frits proved that a robot design can be quickly copied into a working replica when the design is clear and the code available (and the parts happen to be lying around on your workbench). The discussion quickly broadened to all kinds of designs that will project any text, or even moving pictures, onto the wall. This included a more fundamental question of how much resolution you can get out of an ordinary servo. Either spacial or angular.
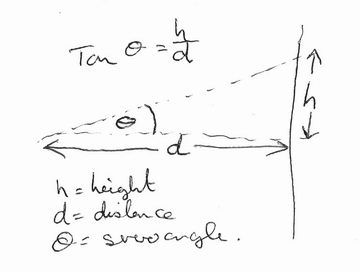
Which, in turn, let frits to question the artsy-ness of us nerds.
baseoverapex would not stand to be insulted (again) and created a beautiful, artsy, Wizzy Writer after he concluded that an LMR-o-scope would not let him off the hook.
frits published the movie of his writer in a separate blog entry, which he entitled “message in a bottle”. Nicola must have (unwittingly?) picked up on that idea, because he now proposes to collaborate in building and operating a Robotic Autonomous Transoceanic Ship.

The wildest dream ever to be presented in the ideas forum, I think. All engineering realism aside, I applaud the spirit of cooperation that is dripping from that page! I hereby declare that I will contribute in any necessary fundamental research for that project. Knowing full well that fundamental research is never a wasted effort, if only you share your results with your maties on letsmakerobots.com!
8ik
 It used to be easy to read them all now its getting a bit challenging!
It used to be easy to read them all now its getting a bit challenging!

