This is getting ahead a bit but I’m making a trip to my local metal supplier today so I’ll grab some 1" aluminum shaft for lathing hubs and some aluminum tubing for possibly making legs sections. I’ll grab some scraps of aluminum block as well for milling any custom pieces we need.
I’m searching my r/c sources for a good deal on some heavy Duty cable systems incase we decide to use it.
Just thinking along the lines of a scorpion, we would need some pretty strong servos to support the extra weight if the arms and tail were functional.
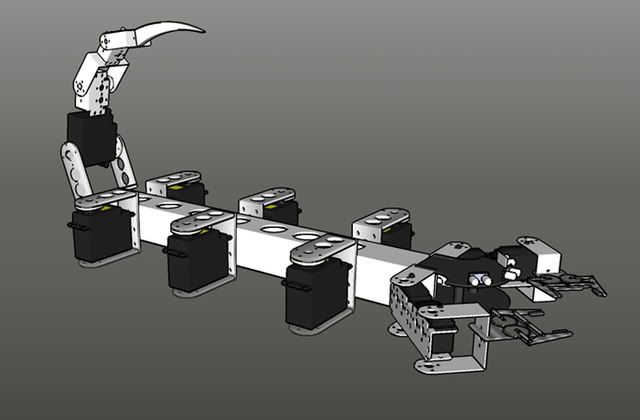
I just wipped up a quick CAD drawing of a basic layout I had in mind. This is simply using the joint to joint dimensions of the lynx inline 3DOF hex except extending the 1.75" tube chassis. It has 805’s for hips and tail base, standard for next tail section and arms. Then a micro on the tip of the tail.
With these dimensions, the hs-805’s will be extreme overkill, but at least we have the power to make it big.
It’s not the best tail design but just something simple that could be programmed in to weave forward and backwards and arch up when in “attack mode”.
No idea how to do the legs yet. The HS-805’s would be lots of power but just so big. And if we use a standard servo on the hip vertical and knee, they possibly would have to be stronger than HS-645’s. Which would also mean there is no reason to use 805’s on the hip rotate.
What do you guys think? Using the 805’s would be cost effective because I have so many of them. We might just have to buy a bunch of 645’s and use those.
aklso, for the tail maybe we could do some sort of wire sysem if it comes down to that, like on a project here someone used wires to make the fingers curl in and extend, just think of it on a bigger scale, the tail wouldn’t be as heavy either, making it be able to move more quickly and it would move more realistic to a 3 DOF tail,
That’s an excellent point. we could have the 6 joints it’s supposed to have with lightweight sections and spring centers. Then use 1 wire to pull the tail like a tendon. Especially if we aren’t having it “live” or anything, just a reactive part of the whole.
That’s a much better idea. Maybe we’ll leave the tail for now and concentrate on what to do for the legs.
I’m thinking we should possible just use HS-645’s all around for the legs. Now sure. Would be nice to have the power of the 805’s they are just so big, the legs would look kind of bulky.
For the hex, I agree, we should use the normal sized servos with mechanisms to make it advance. I’ll try to whip CAD design, but of course I only have google skechup. It would be very nice to have the legs (like in the pic I posted) come out of the body at almost the same area.
Then we have the behing of the scorpion and finaly it’s tail.
I think most things in this project (to make it looks real-life should be with mechanism instead of direct drive.
On the legs, I noticed that the scorpion body was a little wide. Any way that we can stack the knee servo between the spine and the hip rotate servo? And then put the leg lift servo under them both? It is still bulky, but all the bulk is behind the hip (hence, can be hidden in skin).
I don’t have any good CAD at home, so I should try to get a picture of this tomorrow at work.
(What are you using Evo for CAD?)
Oh, I noticed on Tower’s webpage for the 805, they listed 20 deg/s at 8.4V? Is that right? If so, that seems ideal for the 7.2V stick packs that are so prevalent!
It would get far too complex to program if we actually replicated the legs. But I think that for a general shape, it’s starting to look like a scorpion.
I guess the big question now is should we use 12 805’s for the hips and 6 645’s for the knees? Will the 645’s hold up to the extra weight of the 805’s?
Our should we shrink this down a bit and use standard servos all around?
Or possibly use 645’s for hip rotation and buy 12 low profile servos ( servocity.com/html/hs-77bb_low_profile.html ) for the rest of the leg? At 76oz/in they might be good enough if we are using standard sized servos for the hip rotation.
Any thoughts on if we should try to do it big or keep it smaller?
Now my questions also is, will using indirect drive change the physics of the hexapod programs already available? If we keep the same mechanical advantage using a pushrod on a rotating horn it would have a different leg position relative to the servo position, as opposed to direct drive.
I’m considering just upping our budget and buying 6 X HS-645’s and 12 X Low Profile Servos, to use direct drive. Hmm
If used correctly, I would argue that indirect drive will not alter the physics of the bot (hence, the gaits should work as long as the leg length stuff can be factored in - that I don’t know as I don’t have a hex yet)
I was just trying to save money and allow for a larger payload with my suggestion But as I planned to run my hex (if/when I ever build the thing) with either 645s or CS-150s, then I would love to see how they perform!
just to make sure, indirect drive is using some type of extension rod to move the leg from a distance right?
also we’re working on the legs right now, right? how many DOF are we going with right now? and with indirect drive we could use smaller servos (lighter ones) and use a simple leverage system that would improve the power, but would take away a bit from the range that the legs have, up and down movement, it might be worth the sacrafice
That’s too bad. That would have been beatiful with custom made parts and all. I guess it’s too complexe for the programming.
I think that it’s starting to look like a scorpion too!
Chunga, indirect drive is something like this i believe :
As for wich servo we chould use, if we could use the 805 for lifting and the 645’s for turning + knee inderet if we use the 645 and direct if we use low profile servos.
We could probably use 12 servos at this point, the 645 for turning and the 805’s for lifting with an attachment like in the picture above.
We could ust hide the 805 in the main body so it woulnd’t look like it’s really huge.





 But as I planned to run my hex (if/when I ever build the thing) with either 645s or CS-150s, then I would love to see how they perform!
But as I planned to run my hex (if/when I ever build the thing) with either 645s or CS-150s, then I would love to see how they perform!

{kind=link}
{kind=link}
{kind=link}