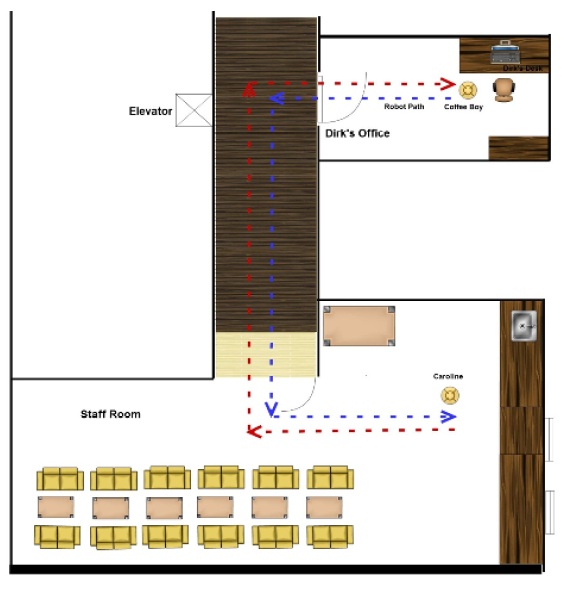
the path from the office to the staff room is hardcoded into the microcontroller, using a combination of wall following and straight line PID feedback control. Guess ill need to upload a pic of the actual path.
the front sensor is used for obstacle detection. If the robot comes into contact with an obstacle it will stop and wait. If the object is still blocking the path after some time, it will try to maneuver a way around the object, and restablish itself on the path.


 Even
Even