

This is Cerberus, a robot I made with my team as an engineering design project. It is designed to operate in a simulated Mars terrain. It's purpose is to pick up and deploy small probes into the ground. For the course, the target soil were cups of sand on top of an incline.
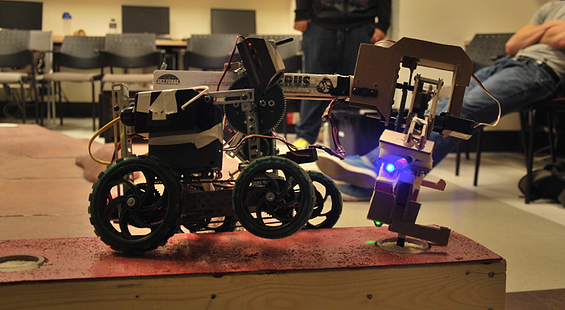
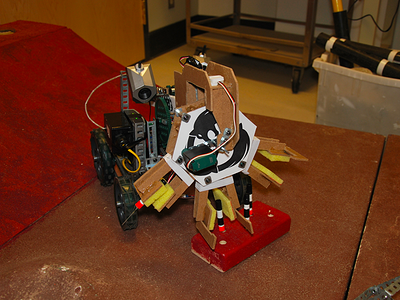
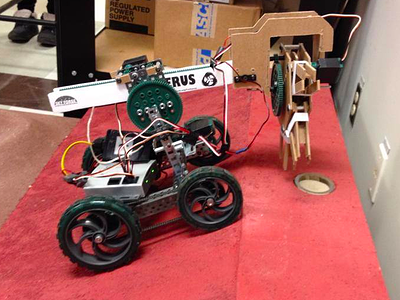
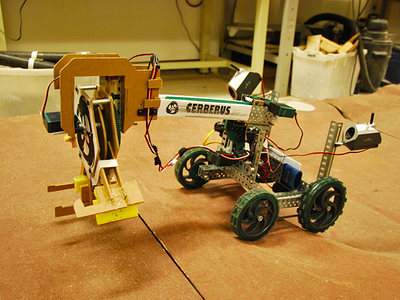
We also had to pick up a wire frame prism and transport it to the other end of the course. Since the objective was to deploy three probes, we built the claw to hold all of them. We were limited to the VEX kit that was provided to us and we had a small budget that we could spend. A lot of time went into designing and constructing the claw. We used one motor to actuate all three pincers and another motor to rotate the claw assembly. The arm extends and pivots.
It also has differential steering and all wheel drive. The front wheels are smaller than the back because those were the wheels that were given to us. Cerberus is remote controlled and for the competition I to drive the robot by using mounted cameras. One was attached to the end of the arm and one was attached near the pivot on the upper arm.
We didn't spend much of our budget. We went to the Dollar Store to buy foam for the pincer pads, elastic bands to close the claws, foam core poster board for the extension I-beam and LED lights to help with aligning the claw with the probes and target soil cups. All of the robots competed on the simulated Mars terrain course for the best time. We came in first place! This was my first real experience with robotics and I must say that I enjoyed it.
Compact Rover for Remote Soil Assessment
- Actuators / output devices: VEX Continuous Rotation Servos, VEX 269 Motors
- Control method: VEX PIC Processor with Radio Control
- CPU: VEX PIC Processor Operator Controlled
- Power source: 7.2 3000 mAh
- Sensors / input devices: CC Cameras
- Target environment: Simulated Terrain COurse
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/cerberus-remote-operated-rover-prototype