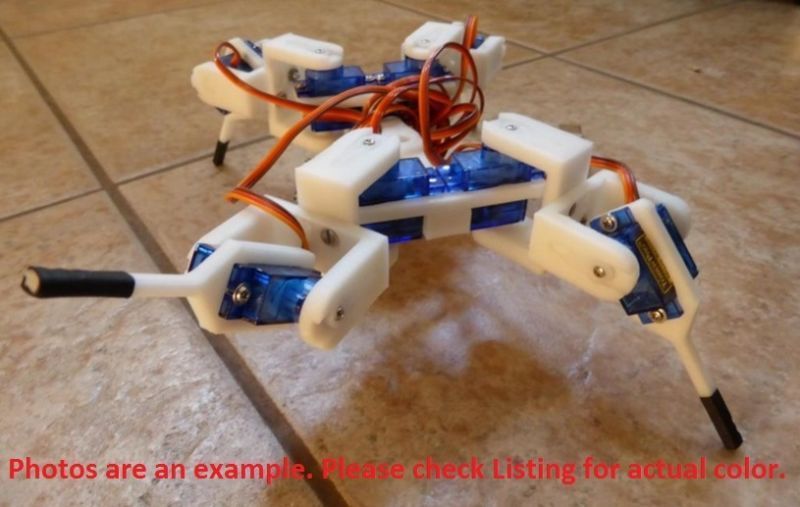
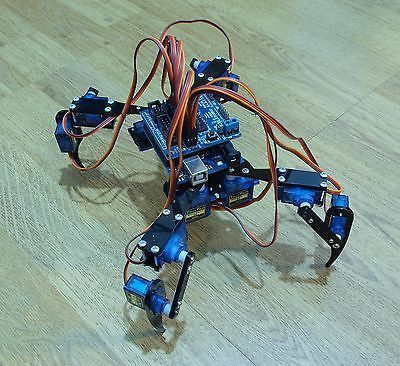
I just completed my first Quadcopter and was looking for a new project to keep me busy when I came across some 3D printed Quadruped and hexapod chassis’. So now I want to build a Quadruped. I’ve got two to choose from below…
I would much prefer the 12 servo model for more articulation. Any way I also want to use a TX to control the Bot. I would also like to use some kind of arduino board (since I’m familiar with the programming) that can connect to my RX and Lipo instead of battery blocks for low weight and ease.
Can some one help me pick out the right Arduino controller, small is better and my computers don’t recognize FTDI so a UART connection would be best. Any help would be appreciated.
Looks like the Nano’s use Looks like the Nano’s use FTDI. But there seems to be a lot of different boards that can use UART. My computers won’t recognize the FTDI devices.
Can some one point me to some reference material on how I would make these boards accept Rc transmitter commands? I found some 32 and 16 channel arduinos but I can’t see how to wire them.
Also would like to study how to connect the servos and which order to do so.
I’d use a Teensy 3.1 for the I’d use a Teensy 3.1 for the controller or even a raspL both have a lot more power than an Arduino. There is also the Dagu Spider controller, which can control up to 32 servos.
I was looking at hex kits on I was looking at hex kits on the BAY and ran across some that claimed they just needed a battery. Include in the kits are 24-32 pin controllers with a PS2 controller and reciever to wirelessly control them.
I was talking about bridge I was talking about bridge devices. Had several different name brand FTDI devices including an HK Multiwii 328p DSM2/FTDI and niether will work. FTDI has been trying to help me and we’ve done several different things including Mprog3.5 to see if it was bricked. Nothing works on either of my computers. So I have been using a CP2102 UART bridge device which works well.
What do you suppose would be the battery requirements for 12X 9g servos?
I’ve build a whole bunch of I’ve build a whole bunch of such quadrupeds, all powered by a single Pro Mini, I wrote an instruction manual for building and programming them here: http://tote.readthedocs.org As you can see, you don’t even need to buy the frame!
I would definitely recommend choosing the 12 servo version, as then you can really program it and use real walking algorithms, not just some hardwired movements that somewhat consistently propel it forward.
As for battery, It really depends a lot on how heavy it will be and how fast you want it to move. I’m using a small 180mAh single-cell LiPo battery in some of my lightest robots, and that lets them walk around continuously for about 20 minutes. Note, that the alkaline batteries usually will not be suitable – they give too little current and are generally too heavy. You will want lipos or lifepo4 or something similar. A battery from an old cellphone should work fine.
Well, every arduino board I Well, every arduino board I know has the tx and rx pins broken out, so you can always connect an external USB2TTL to them and use that.
I ordered the 12 servo version and the 24pin arduino compatible servo controller that comes with a PS2 controller and reciever. I’ve got plenty of 3.7v lipos lying around in many different capacities, so that awesome.
I was wondering if you could point me out to the programming and language I need to learn in order to program. I use Arduino for my quadcopter but it’s all pre-programmed. Just have to define values.
Well, there is a short guide Well, there is a short guide and a reference for the Arduino libraries at http://www.arduino.cc/en/Guide/HomePage
You can see the code for my quadruped at https://bitbucket.org/thesheep/tote/src/tip/start/ and the explanation for how that works is in the guide that I already linked.
If you are not familiar with the C and C++ languages, you might want to start with that, there are lots of books and courses around.
Found an online tutorial Found an online tutorial that lets me write programs with visual studio for C++. I’ve been looking at the arduino page but not seeing anything to teach me the code to use in the IDE. Or is C++ the language used?
Back to batteries Ok we seriously need to talk about power needs. TP SG-92R servos operate a 4.8v and can take up to 6v. Non-reachargeables are out. I can’t afford to buy batteries every time I want to use it so we need to think about Lipo.
Also I asked the dealer of my Quad who also sells the Hex version using the same type parts says to use a 7.4v along with all the hexes running 9g servos. They also come with the same controller board and wireless TX/RX system.
The controllers input voltage can range from 6.5v~12v or 3.5v~5.5v
It also says… Servos power supply DC generally 5v.
Now this made me think…
Does or can the controller put out the right voltage by either programming or some other means? Like a built in step down circuit?
Can I use a step down circuit inbetween the controllers power input and my battery?
That controller doesn’t have That controller doesn’t have the step-down regulator that you need. It only has a small linear regulator for powering its own electronics – that’s why you can power it with such a wide range of voltages.
You have several options:
You can power the whole robot, the servos and the controller, from a single 3.7V LiPo cell. The servos will be a little slower to move and a little weaker, but otherwise should work (it works with my SG90 servos, which are very similar).
You can try to get two LiFePO4 cells, for the total of 6.4V. Those batteries are much safer than LiPo and have stable voltage, but they are a little more expensive and you will need to find a charger for them.
You can always make it drag a cable behind it, and power it from a bench power supply – this is actually quite convenient while you are working on it, because you don’t have to recharge the batteries every half an hour then. It’s nice to at least have an option to do that, even if it will be using batteries when finished.
Old RC hound I’ve been doing RC and other electronics for most of my life. I learned a long time ago not to go over the suggested voltage for any given electrical module. I’m budget minded also.
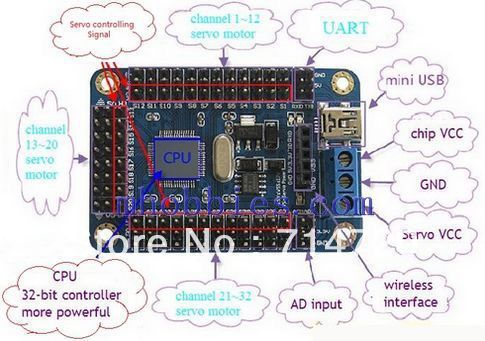
Any way I found this diagram for my servo controller…
The baby blue parts that say Chip VCC, ground, servo VCC have lil screw heads like an old Hifi. I’m assuming that they are the power and ground inputs. If so then I found some adjustable step downs that can convert my 7.4v to 5-6v. It also looks like I can run a short jump wire from the Chip VCC to the Servo VCC. Which should power both my SC and servos.
Ok talk to me about voltage Ok talk to me about voltage regulators. Are these different from a step down. It says you use one per three legs how do you wire them all together to the board? Would you mind taking a pic of your wiring?
Ok I found this kit. It’s Ok I found this kit. It’s for a bigger hex but I used it as a shopping list…http://pages.ebay.com/link/?nav=item.view&alt=web&id=161721920075 … I already have the servo controller, bought the 12A DC step down power module, the nano V3.0 and the nano terminal shield. Can you think of anything else I might need? …I’m also designing my own platform.