

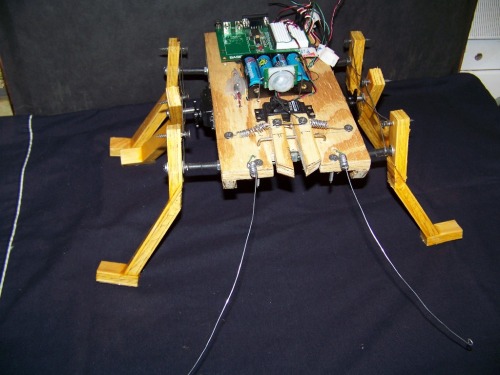
 bugbot 1 is for most an boebot with modified chasis it has a pir motion sensor,2full rototation servos and a parallax standard servo for the mandable it also features a mercury tilt switch so the bug knows when it should stop moving in tilt situations like table edges to atempt a reverse or if you pick it up it will attempt to pinch you with its functioning mandable the mandable also has a touch sensor to know it has caught you as well as sound and light sensitivity I also included a phillips pcf8574 I2C expander to give me 8 more input/out puts and the ability to connect to my ti86 programable calculator aswell as the parallax BS2 homework board as the main board. also an ADCµphone to do sound sensitivity&mesurement and and audio amplifier for outputing audible communication and different types of alarms. I am now working on a solar driven dynomo to power the rechargable battries and bugbot 1 will then become a scorpion with three robotic arms aswell,one as the tail.
bugbot 1 is for most an boebot with modified chasis it has a pir motion sensor,2full rototation servos and a parallax standard servo for the mandable it also features a mercury tilt switch so the bug knows when it should stop moving in tilt situations like table edges to atempt a reverse or if you pick it up it will attempt to pinch you with its functioning mandable the mandable also has a touch sensor to know it has caught you as well as sound and light sensitivity I also included a phillips pcf8574 I2C expander to give me 8 more input/out puts and the ability to connect to my ti86 programable calculator aswell as the parallax BS2 homework board as the main board. also an ADCµphone to do sound sensitivity&mesurement and and audio amplifier for outputing audible communication and different types of alarms. I am now working on a solar driven dynomo to power the rechargable battries and bugbot 1 will then become a scorpion with three robotic arms aswell,one as the tail.
I recently saw a frittsLDR sensor on this site that I might have to add to the bot for light sencing I hope to meet the guy who came up with it to discuss some ideas I have to make it sensitive to colors too I got this little LED stoplight circuit for a nickle at the flea market that I think I can modify into the led driver for the FrittzLDR which can be senced by the BS2 and true color recognition made possible on the cheap-cheap.
bugbot1 has no real intended application but just a good atempt to demonstrate and home my skills.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/bugbot1