i am trying to design a robotic arm with 5 degrees of freedom. i will connect the arm motors with a power source. Is this necessary to give bake for all motors ? so that the arm will not go down while power is off. Is there any method to hold an arm when the power is suddenly went ?
In case of giving brakes in motors, where should i gave provision for brakes ? please suggest some ideas.
Do you mean “brake”? If so, a power supply alone is not a “brake”.
Yes - you can do this using gearing which is not back-drive-able (like worm gears), a mechanical brake or even an electrical brake (normally closed when not powered).
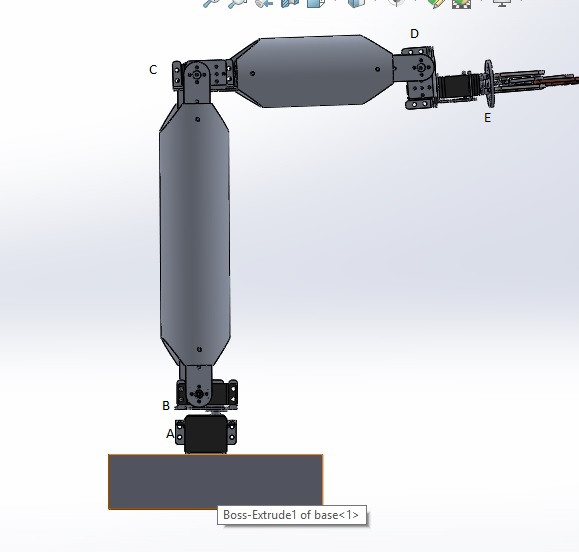
Be sure to do all calculations for torque before buying the parts - based on your drawing, and the size of the servos, there is a strong chance that the shoulder won’t be powerful enough for that arm.