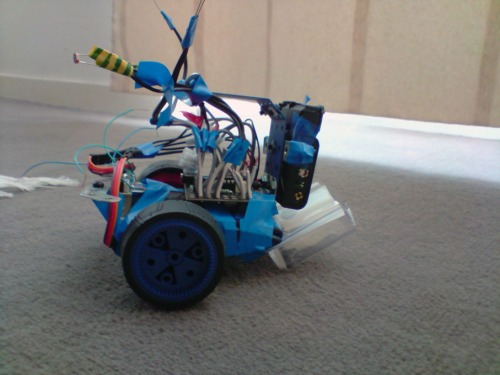
Beleive it or not, that thing without real shapes is a robot! It's my first attempt to make a bot with a brain, a picaxe 18X.
He moves with 2 home-made continuous rotation servos that are concealed into an old modem case. Add some Meccano to hold the batteries and the LDR, the first piece of plastic i found in my garbage as a third wheel, and a lot of electric tape...
The video is pretty crappy, but i just have my phone to film -_-v
This robot was supposed to have 2 bumper switches, hence the Meccano pieces on the front, but since i got a lot of new stuff, and plenty of ideas, he's condemned to death... sorry dude, i like you but i need your brain... (and that's also why the code has more things that he needs)
And thanks to everybody for answering my questions (and generally speaking, for the motivation!), and special thanks to... the fucking manual ^_^v
No i assure you, he’s ugly! But that doesn’t mean i dont like it… ^^
“Hot glue is cooler than Blue masking tape.”
After PC Vs Mac, Arduino Vs Picaxe, VB Vs Perl, here comes Hot Glue Vs Blue Tape! I like (blue) tape for two reasons : you can unstick it very easily, and it gives the robot a unique look… But if i wanted to build something more permanent, i’ll sure give it a try!
“5 stars cuse my last name is yamada. Also i like the movie totoro.”
what would you do with it? what would you do with it? If you are new to robotics learn from making things yourself. Starting with code and trying to understand it or build a robot to match code doesn’t work.
i have a sample code for SRF05 , i was just wondering if i have to use the same PULSOUT and PULSIN commands
here is my code :please comment !!
Symbol dangerlevel = 50 ’ how far away should thing be, before we react? symbol turn = 300 ’ this sets how much should be turned symbol servo_turn = 700 ’ This sets for how long time we should wait for the servo to turn (depending on it´s speed) before we measure distance symbol trig = 3 ‘ Define output pin for Trigger pulse symbol echo = 6 ‘ Define input pin for Echo pulse symbol range = w1 ‘ 16 bit word variable for range
main: ’ the main loop pulsout trig,2 ‘ produce 20uS trigger pulse (must be minimum of 10uS) pulsin echo,1,range ‘ measures the range in 10uS steps pause 100 let range = range * 10 / 58 ‘ multiply by 10 then divide by 58 readadc range, b1 if b1 < dangerlevel then gosub nodanger ’ if nothing ahead, drive forward else gosub whichway ’ if obstacle ahead then decide which way is better end if goto main ’ this ends the loop, the rest are only sub-routines
nodanger:’ this should be your combination to make the robot drive forward, these you most likely need to adjust to fit the way you have wired your robots motors high 5 : high 6 : low 4 : low 7 goto main
whichway: gosub totalhalt ’ first stop!
‘Look one way: gosub lturn ’ look to one side pause servo_turn ’ wait for the servo to be finished turning gosub totalhalt readadc range, b1 ’Look the other way: gosub rturn ’ look to another side pause servo_turn ’ wait for the servo to be finished turning gosub totalhalt readadc range, b2
’ Decide which is the better way: if b1<b2 then gosub body_lturn else gosub body_rturn end if return
body_lturn: high 6 : low 5 : low 7 : high 4 ’ this should be your combination that turns the robot one way pause turn : gosub totalhalt return
body_rturn: high 5 : low 6 : low 4 : high 7 ’ this should be your combination that turns the robot the other way pause turn : gosub totalhalt return
rturn: servo 0, 100 ’ look to one side return
lturn: servo 0, 200 ’ look to the other side return
totalhalt: low 4 : low 5 : low 6 : low 7 ’ low on all 4 halts the robot! Servo 0,150 ’ face forward wait 1 ’ freeze all for one second return
You ought to post your own You ought to post your own questions in the forums, not on other peoples pages, unless it relates to the page in question, which this doesn’t really.



 I like (blue) tape for two reasons : you can unstick it very easily, and it gives the robot a unique look… But if i wanted to build something more permanent, i’ll sure give it a try!
I like (blue) tape for two reasons : you can unstick it very easily, and it gives the robot a unique look… But if i wanted to build something more permanent, i’ll sure give it a try!