

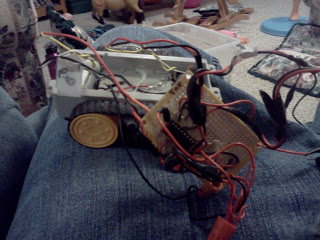
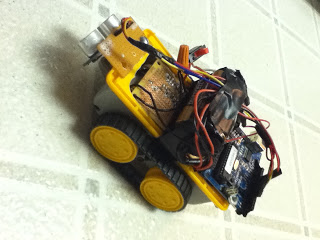
My newest bot. I hadn't had time to build one recently, so I MADE time. Heh. Not too much to say about the little guy. I scavenged the tracks/base off of a toy skid-loader. The base has a bay for 3 AA batteries, but i decided to add a 4-AA battery pack to get more speed out of him. I don't mind changing out the motors if I burn them out doing it. It's far more fun to watch him scoot around at the speed he does now.
I decided to name him Boots because 99% of the time I was working on him, my daughter had Dora blasting in the background and it stuck in my head.
His design is pretty basic:
Arduino Duemilanove
SN754410 Quad Half H-Bridge
Parallax Ping sensor
At this point he just drives around avoiding obstacles. My main hurdle was getting the code to work properly. Big thanks to jtk14 for the help he provided there. Thanks also to the rest of the guys over in the shout box for helping pick my way through each issue i had.


Obstacle avoidance
- Control method: autonomous
- CPU: Arduino Duemilanove (328)
- Power source: 4 AA batteries, 9v for Arduino
- Programming language: Arduino Processing
- Sensors / input devices: Parallax Ping
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/boots
 Glad to see you got your problems sorted.
Glad to see you got your problems sorted.