

Hi, BlueFarAway is my first attempt of building a robot. It´s like a playground where I can experiment. I got an Arduino for another purpose and wondered how far could I go by using recycled parts, and that became the main objective of this robot. Build it as cheap as possible by using recycled things.
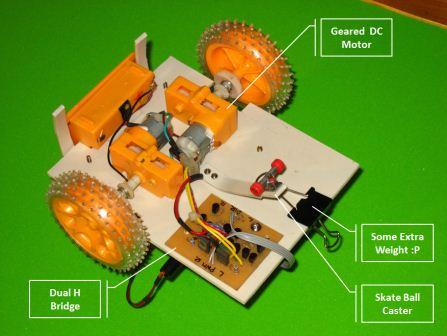
So BlueFarAway has 2 geared motors and wheels borrowed from toys, a chassis made of a CD case box, a ball caster made with mini skate wheels, battery holders from other toys and a dual H-Bridge made of old electronic components. Even the rechargeable batteries are old!!
Even though it works and it´s pretty fast (faster than I´d like her to be). I´m building (and struggling with) line sensors with old TIL 99 phototransistors and “who knows” photodiodes. But´s part of the fun J. If testing succeeds I´ll be adding homemade IR sensors for obstacles so it becomes autonomous.
Here are some Photos:
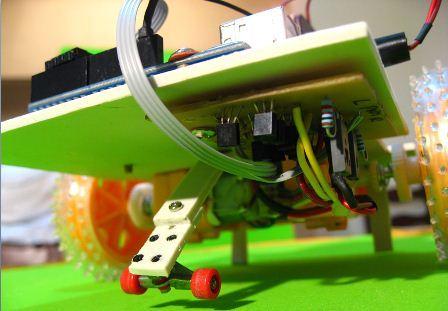
Buttom View
If you happen to be an ant, this would be yours perpective:
Kind regards,
Rodrigo.
- Actuators / output devices: 2 geared motors
- Control method: non-autonomous so far
- CPU: Arduino Duemilanove (328)
- Power source: 7.2V NiMH for Logic & 4.5V for motors
- Sensors / input devices: home made sensor WIP
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/bluefaraway

