

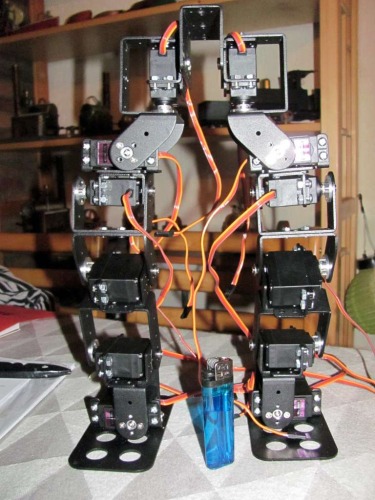
This will be my mech like biped named "Troublesome", current version 0.8. Code name "Mao". Why Mao? Because it's 100% Chinese of course and since I live in the european union of dictatorship, the name of a dictator seems appropriate.
Mao's bracket arrangement is of my own design. (It used to be a 17 DOF humanoid.) It has 6 DOF per leg and when finished another 2 (or) 3 DOF in the head. It all depends on the total weight.
The "brains" of the biped will be an Arduino Mega and the power will be delivered by one power source (3s LiPo). Two 15A peak Buck converters running at 6v will power the servos, a 5v voltage regulator will take care of the sensors (ultrasonic, switch, infrared, accelerometer and compass) and the Arduino will be powered directly from the battery. I'm not sure yet if that will result in a lot of noise, but I have no weight to spare for an additional battery.
The programming part will be interesting. I will try to avoid inverse kinematics, because it's complex and I don't need accuracy. I will be using a set of fixed "rules" together with trigonometry to get the desired walking gaits and movements. In the prototyping phase the software will be running on my laptop connected to the Arduino via USB, after that I'll translate the program to Arduino code and then Mao will have to explore the world on it's own.
Mao may look quite intimidating as a first robot and it is. I'm not entirely sure myself why I thought this would be a good idea as a first robot. On the other hand, it's not exactly rocket science so what can go wrong? ;)
Will explore the world autonomously, eventually.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/biped-t0-8-mao
