

Upgrade 10/9/2001
Hello again
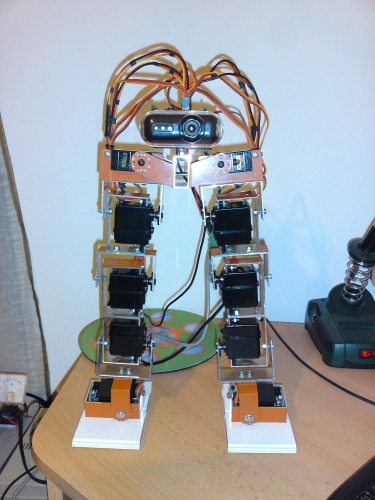
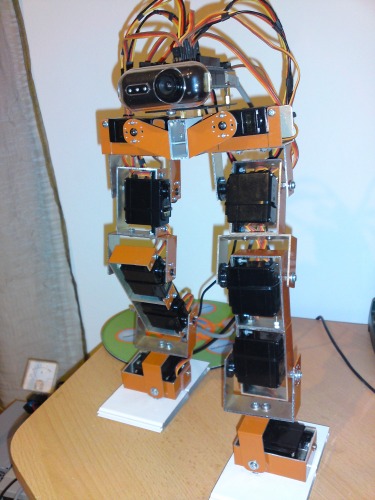
I've made some additions to the Red-Dragon in order to make a humanoid robot.
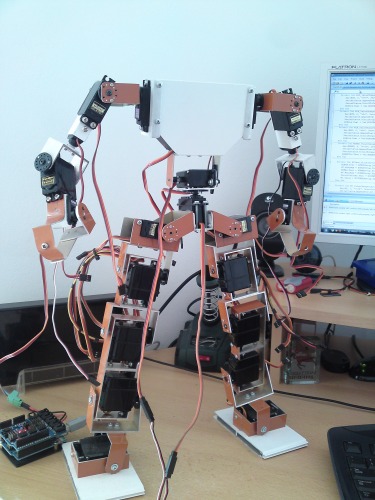

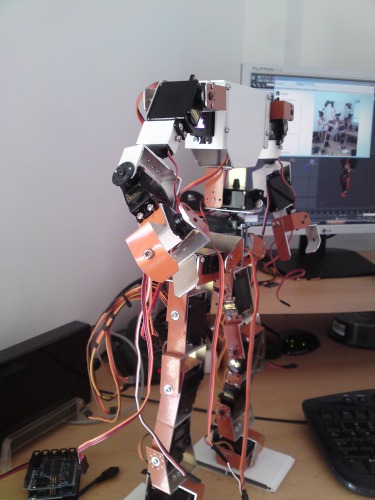
-I added body and hands! The body can rotate left and right and move forward and back.
Its movemont happens through 2 servos mg995
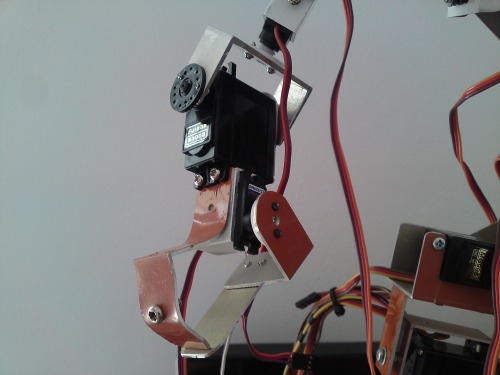
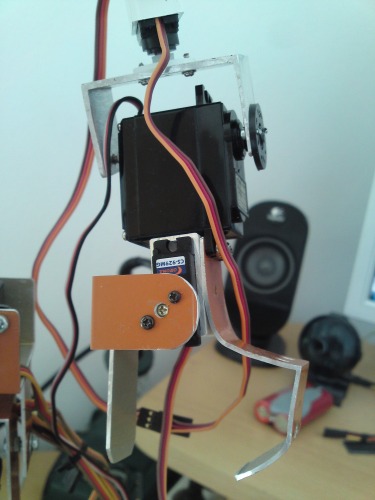
-Hands have 5 degrees of freedom,so they can produce all the movements of a human hand!
I have made calipers so that it can take objects!
Its hands are consisting from a mg996 for forward and backward,one microservo corona 929mg for the rotate of the second clavicle,
one microse,one s3003 to move up and down the bottom of the hand and finally one more corona 929mg so that the calipers can close!!



For testing it it will be put one controller scc-32usb and a battery li-ion 16850 2800mha in 7.4V.
Its weight comes to 1.8kg without battery and the controller and its height at 48cm.
For any changes I will inform you..So far I have uploaded some photos!!
Introduction of the Robot
The construction I called Red-Dragon ..It is a bipedal robot with 5 degrees freedom per leg!The robot has the ability to walk forwards, backwards and change direction without using the sixth degree of freedom as would be ideal! The way of walking based on a balance of one leg (single support) and not the 2 together as man!The total height is 34cm and a length of foot 29cm, width 15cm and weight is 1.185 pounds!Figure (1) (2) (3). The robot is non-autonomous and therefore did not use some kind of sensor.

Primary objective
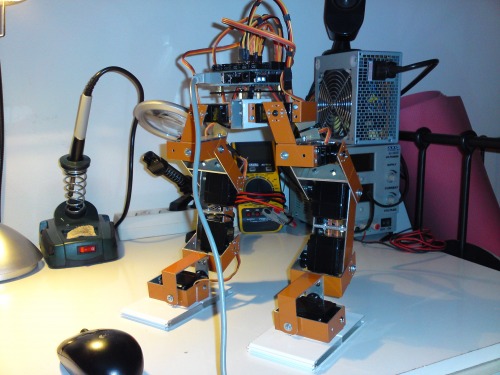
The initial design and construction of the robot was different from the result.I started and built a Biped in the style of Ed-209 but due to bad design was not able to do to walk and the way traffic was very difficult in relation to human movement have used the second construction.image (4), (5)

Design
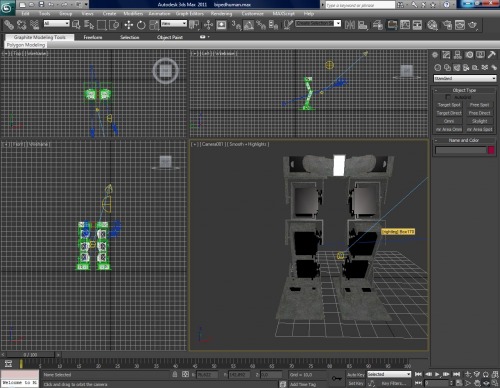
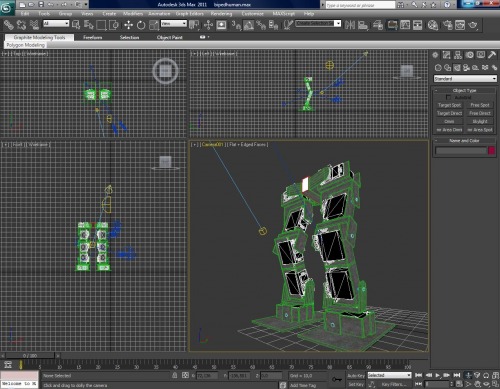
The building was designed from the start the computer in 3D in 3D studio max in real dimensions to have the opportunity to be able to do a simulation for the equilibrium and motion of the structure.image (6), (7)
Construction Materials
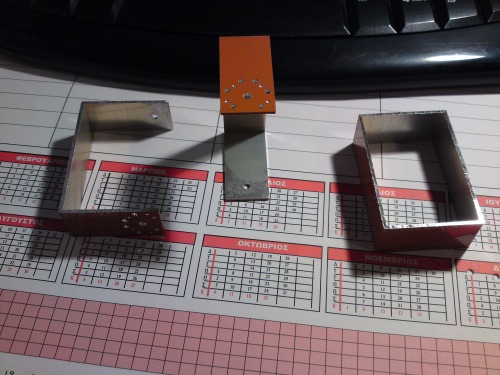
The construction is based on our arduino board, a sensor Shield 4v done a conversion for external power, and 10 Servo mg995! Parts of the robot is made of 20 pieces of aluminum with dimensions 4ch6 cm, relatively difficult to find in trade are not used to see picture (8) with appropriate treatment was support servo tracks or pieces of each joint ...on the trunk that connects the 2 feet used a piece of aluminum and a plate treads 12ch8 cm. The nozzle is able to move right and left that serves to balance and support the robot and back and forth. The same degree of freedom has the upper leg, and that has the ability to move right, left us with more success on the balance of the robot.
Programming
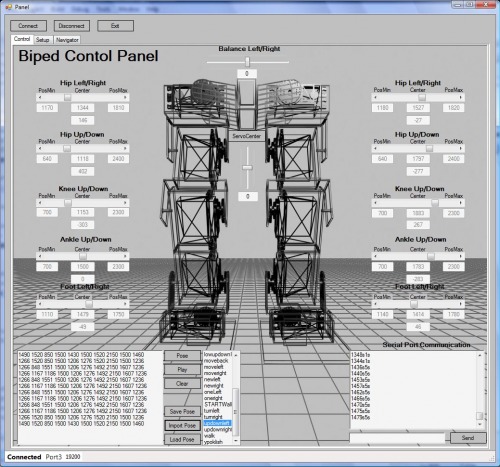
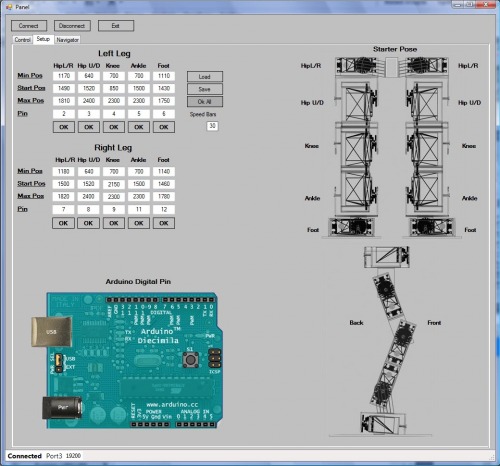
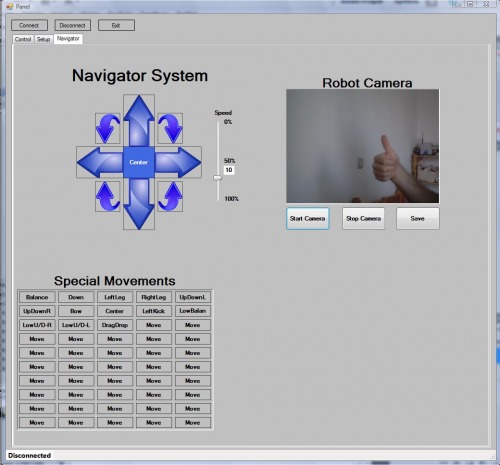
The code that I wrote the piece based on the arduino library servo.h, using the digital out from 2 to 11 and for the handling of a panel created in visual Basic.net which means that we can have 100% all functions !Specifically through the control Panel icon (9), (10), (11) we can stake out the servo, can move 1 or more together to create a posture or movement and to have operable as to where we want to steer having image from the camera is attached on the robot!It is also possible definition of speed. image (9) [
The problem arose with the communication Vb.net with Arduino was that we had simultaneous servo drive so it can be a move up!To this problem because I did not use a servo shield as it should, but only the Arduino. That's why I wrote a piece of code that can give us simultaneous motion and 10 servo with adjustable speed performance! The communication between Vb.net and arduino is via a usb cable but it can be added to the program mode via Bluetooth enough to have the same shield for Arduino
Catering
The supply of power provided by a gateway computer connected to 5V via cable to shield!The servo I used have a rated power at 5V 12kg thus requiring up to 8 amp ..Of course there is a possibility of adding 2 batarionv lithium ion 3.7v 18650 on each is very lightweight and can provide the power needed.
Walk forword,back.left,right,balance one leg, up-down 1 or 2 leg,Turn right-left,camera
- Actuators / output devices: 10x Mg995
- Control method: non-autonomous
- CPU: Arduino Duemilanove
- Power source: ATX PSU
- Programming language: Visual Basic .Net
- Sensors / input devices: none
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/biped-robot-red-dragon-v2-upgrade


