

The was the original post for MAX V2.
I kept having issues with the center of gravity and occasionally falling over. I tried just about everything to fix this issue with no luck. The only thing left was to create larger feet and decided to switch over to a whole new project that would not have this issue.
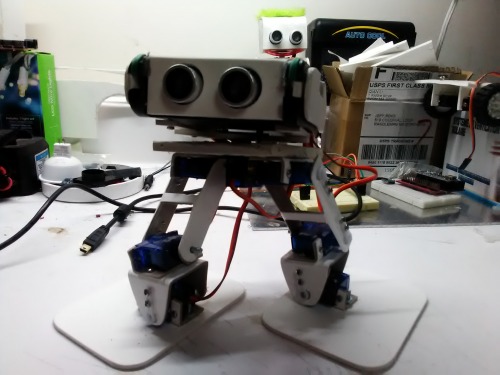
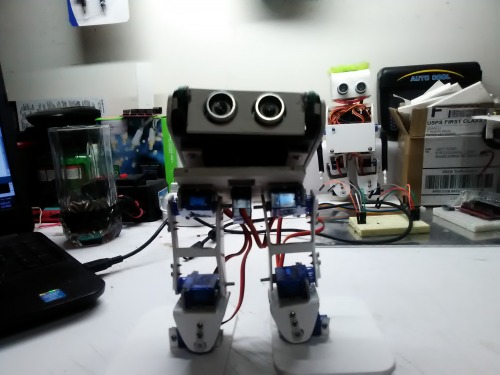
I occasionally visit our local pawn shop and the other day I was in there and saw a bin with several old radar detectors in it. I found three that I liked, two of them are the Uniden Laser 3-Band,Lrd -1900. I really liked the contour of the case and figured with some careful planning I could make them work.
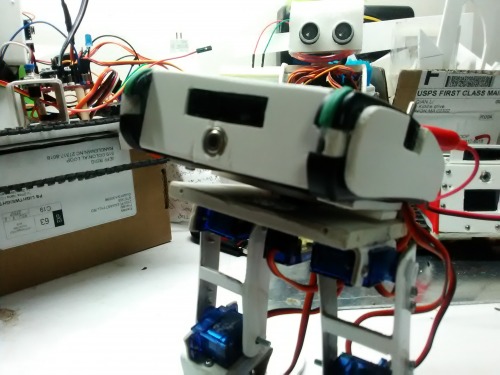
After some cutting, grinding and sanding I was able to fit an Arduino Nana, Sensor board, 2-3.7v 1200Mah batteries, Ping sensor and a switch into the case.
I used the same code thatI was using with Max v2 and right away it took off walking with no issues.
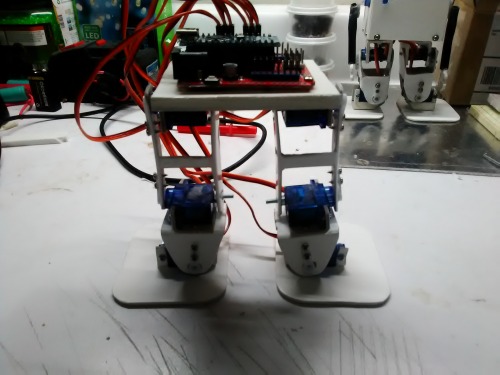
This is a begining stage picture where I was testing the servo configuration.
No sensors are being used.




UPDATE: 1/21/18
I have been doing alot of experimenting with different walking gaits to come up with one that works well and is smooth. After watching many videos of biped walking the one thing I have found is that they all try to walk to fast and in return a vibration sets up and before you know it the bot is wobbling. While most bots use accerometers or other sensors to detect and correct the bot from wobbling, I do not have anymore room in Radar to add another sensor of any kind. I used some creative programming and some well timed delays to achieve the same. A New Video of the walking gait has been uploaded.
UPDATE: 2/3/2018
After doing some evaluating of radar's walking gait and disecting the delay's I have in place. I found that some of the delay's I had in place could be reduced quite a bit. The end result is that the walking cycle is still just as smooth but the walking speed in almost double.
I will post a new video soon.
Until Then!
UPDATE: 4/8/2018
After the good results I received from using the Temperature sensor and Sharp IR sensor on Microbot (OG) I decided to upgrade Radar.
I added the Sharp IR Distance sensor and the IR Temperature sensor and once again some great results.
The bot is able to navigate so much better and detect when a person walks infront of him.
When a person walks infront of the bot it immediatly walks backwards to avoid contact.
The temperature sensor also alows for human interaction so you can use your hand and interact with the bot by moving him forward and backwards and stopping him.
New video will be posted soon.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/biped-robot-radar

