

For the winter time I need a Robot for indoor. My other one (AUROB Isaac) is to big to drive in my flat.
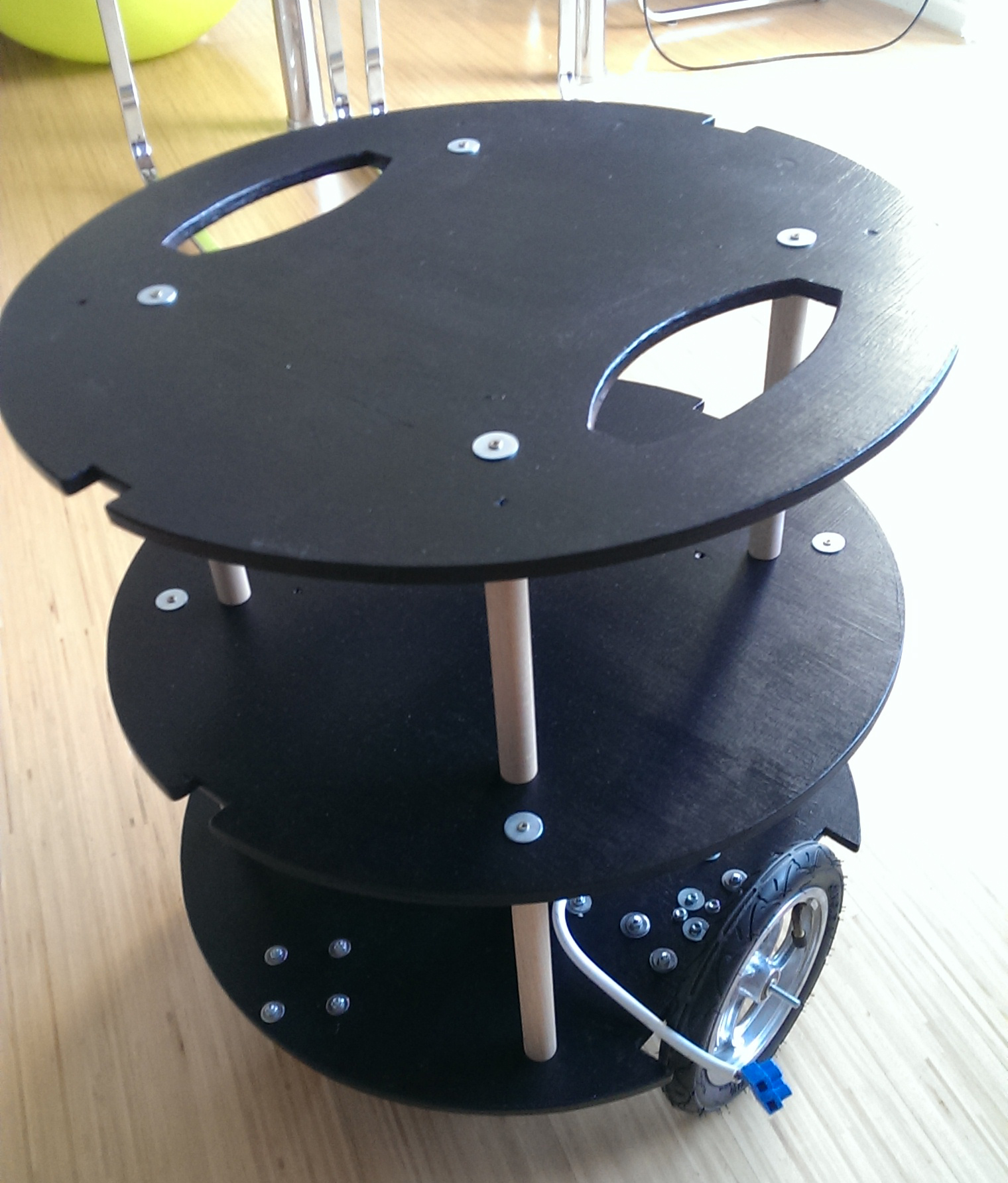
So - I have made a Robot like the Microsoft Eddie bot - but cheaper ;) It´s wooden made with cheap gearmotors and things from the DIY-Market. The engine is mounted with two large metal angle. The bearing blocks are mounted with smaller angles. The drive axles are normal threaded rods.
What I need now are the couplings to connect the drive to the motor shaft - which I will do in the next days. The other structure is similar to that of Isaac - Arduino, ultrasonic sensors, Kinect, laptop, odometry, compass, accelerometer, ....
The software will be largely met by Isaac. In addition, a person recognition and a few other gimmicks such a voice recognition, etc. As soon I have news I'll post it of course ;)
Greetings from Austria, Arno





Navigate in my flat via Kinect, compas and ultrasonic, obstacle avoidance, now me and other people, can hear and speak
- Actuators / output devices: 2 x Pollin ARM922696716_03
- CPU: Win7 CPU: 1 i7-7200M Notebook, 1 Arduino Mega
- Operating system: win7
- Power source: 1x12V 10AH for motors and electronic
- Programming language: C#
- Sensors / input devices: Kinect, Odometrie, CMPS10, Arduino mega
- Target environment: indoor
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/aurob-myra-low-budget-ms-eddie-robot-version