Hi geeks ;-)
I am thinking about to shrink some of my projects. That's the deal. I am planning to build a Attiny-Duino.
What would you think about it's usage? For myself I would use it in the Insect bot to reduce the weight, costs and power comsumption.
UPDATE June 8 2012:
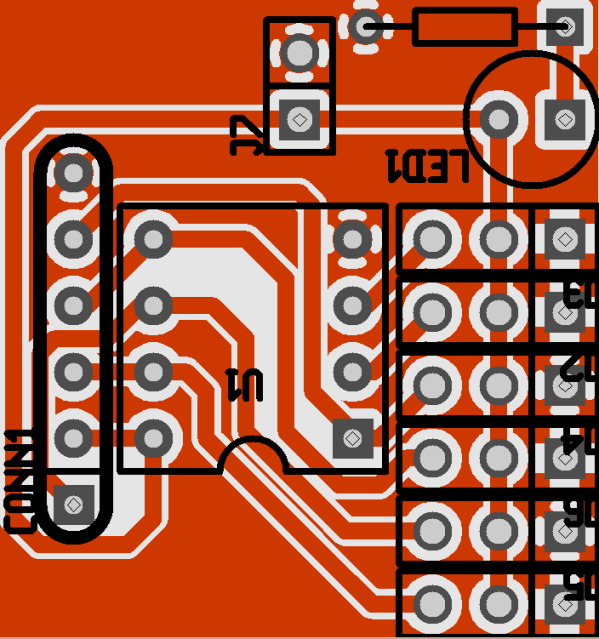
My first PCB since 1988 and I will call it AT-LUMI-TINY ;-) This board is still far from perfect (see the jumper wires) but it's my first 1-layer board created on the computer.
It's 27mm x 27mm and contains 1x ISP port, 1x 6x3 header (two rows for the power supply one for the signal) for attaching servos, 1x LED on pin 0 and one port for the power. This will be improved later since the soccer board was etched tonight ;-) Happy drilling tomorrow...

UPDATE:
As I already wrote, the PCB is far from perfect. There is a version 2 with separated I/O pin headers 2x(3x3) for better routing on the board. This reduced the size of the board to 25mmx25mm. Pictures will come later.
UPDATE JUNE 19:
Birdmun did not let me rest ;-) I got the board even smaller (ok, I cheated with adding one jumper wire)
See picture.

and here in 3D

I am just trying how small is possible. This is not a competition but I have to say that birdmun gave me a hard time after releasing his 24.4 x 21.6 wonder :-)
The board with that Attiny will be bigger in the final design since we need it also a bit handy and may add some more useful components. we are trageting a board with app. 30mm x 50mm.
If you get that one even smaller, then show it here ;-) but I doubt that it can be much smaller since the compoments set the minimum size. With all those standard 3x1 pin arrays I see no way to shrink it more.
Edit: As you can see in the comments birdmun found a error. That happens when you do things in a hurry ;-) I changed the resistor and doing this i was able to even shrink the board more. Now it's 20.3mm x 21.6mm.
On OddBot's request here is the schematic.
Click to enlarge the picture:

Schematics corrected!
UPDATE July 16:
Last night I etched the PCB for the first test. After drilling and soldering all the components I had a short circuit on the board which prevented the programming via ISP port but not the execution of the program when uploading it to the Attiny on the breadboard.
We tried the servos and got 3 of them working. However, the servo on Pin 3 was not moving at all. The connection from the Attiny is correct, power is there but no movement. I am not sure why but I guess it’s something in the library and/or the programming.
Also the timer is srewed up. A delay(1000) for example flashes the LED like delay(50) under normal conditions. But this can be adjusted in the programming. Tomorrow is the troubleshooting and debugging, if the PCB is ok then we are going to send the files to the factory. Pictures and short movie coming soon…

This is the PCB we etched and tested.As you see the size is bigger than before. The reason is not to build the smalles board (this we proofed in our little competition) but to build a board which is handy and can be used in different projects.
Circuit diagram (click the pic for big):

The LED on pin 0 is missing in the circuit plan since it was added directly in the BRD file.
I an still sure that we can improve a lot but that’s it now. If we don’t find something to improve or to change we will send the to the factory. Video is uploaded and ready to go. In the Video are just two servos connected since the USB does not power that much load. With the external power supply we attached 4 servos…but only 3 are moving for above mentioned yet unknown reasons.
https://www.youtube.com/watch?v=j0LHbxmsuEo Also want to use it as a educational board for our workshops.
Also want to use it as a educational board for our workshops.