This is my first robot with programming so I would be glad, if you gave me some tips if you find any issues in the code.
My robot is based on an AT-AT from STAR WARS (https://www.youtube.com/watch?v=7FSggapwUC4 at 4:28) but it isn't very much looking like one (now).
This robot is not very professional and just made from scratch and old wood that was laying in our cellar to keep the cost down.
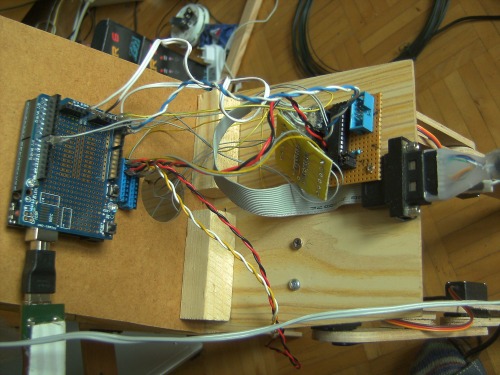
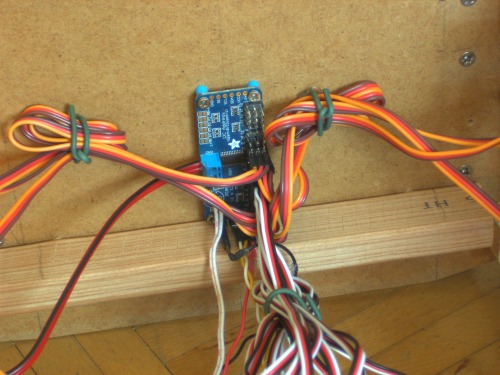
I used an arduino clone from SainSmart an prototype board an MCP23017 i2c port expander for a 4x4 keyboard wich I got from an old printer I modified it so I can use it for my project.From that printer I got a lcd too, unfortunatly without a backlight LED.Moreover there is an old CD drive wich I use for a boarding bridge.An old joystick is used for the controls (I had to modifi that too) and 8 servos for the legs 2 for the head (not build yet).
The original AT-AT walks to unstable so I decided to use the walk of a horse.I got the simple walk structure ready but still need to do the fine tune.The AT-AT can knee, it can walk, it can move out the bridge (I removed the bridge for now to keep the weight down), it can turn, it shows the temperature and later it should be able to scan the environment with an ultrasonic range sensor and maybe I add some speaker.
The dimensions are: 60cm x 60cm x 17cm.The weight I don't know.
If I forgot to say something you want to know please ask.
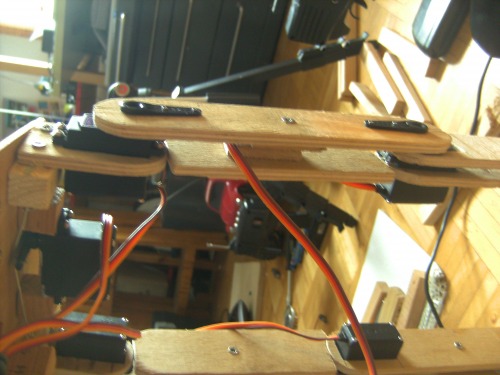
I am using Towardpro MG996R digital high torque servos got them for 20 bucks for 4 servos on ebay.They got 15kg/cm and they’re metal gear and I think with ball bearing too.
Hey I remember chating with you in the shoutbox. Nice robot and I can’t wait to see some more progress. Just to let you know any ideas for special effects I sugest you look at a forum I started or ask me. Thank you.
That looks like a cool project. I am a Star Wars fan and would like to see your AT-At walking.
As for the professionality, well, LMR is a hobby robot community and that’s what counts. Using otherwise trashed components is very common and useful…we may call it even “Green Robot” since it’s using recycled components
I am looking forward to the walking style and the finished robot.
It walks like a horse walks.First the front left leg then the rear right, the front right and at least the rear left and so on.So while one leg is going backwards for the next step all others must move forward so the backward move takes 3 times the time of the forward move.But the distance to the floor varies every time and that’s my problem now.
Yes sometimes it look’s just cool but isn’t working in real.Anyway, Yeah LEGO figures are 4,2cm long, in real that would be approx. 1,80m and my AT-AT is 60cm high in “real” 20m.So, in my AT-AT 1m real are 3cm but the LEGO fig. is just 2,3 cm.
Here some pics with a LEGO king I found in my room:
So as you can see a huge difference nevertheless a nice idea.But maybe I can build a small robot that fits in there ...
First I will try to get it walk then I look for any special effects because if I got it looking cool but then it doesn’t walk it is all wasted. But thanks for your help!
Yes,but they still look neat Yes,but they still look neat if your not paying close attention. I have a bunch of the oddball figs they sell in random packages. I have a couple of deep ones, a disco skater/singer, some evil cultist dudes and orcs (they might fight right in giving it a Warhammer look). I only have one storm trooper. I want some mimes,