


AT-AT
Hello all,
This is my first robot with programming so I would be glad, if you gave me some tips if you find any issues in the code.
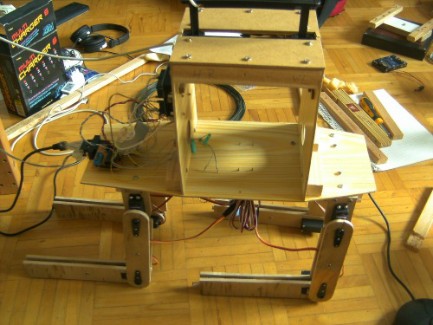
My robot is based on an AT-AT from STAR WARS (https://www.youtube.com/watch?v=7FSggapwUC4 at 4:28) but it isn't very much looking like one (now).
This robot is not very professional and just made from scratch and old wood that was laying in our cellar to keep the cost down.
I used an arduino clone from SainSmart an prototype board an MCP23017 i2c port expander for a 4x4 keyboard wich I got from an old printer I modified it so I can use it for my project.From that printer I got a lcd too, unfortunatly without a backlight LED.Moreover there is an old CD drive wich I use for a boarding bridge.An old joystick is used for the controls (I had to modifi that too) and 8 servos for the legs 2 for the head (not build yet).
The original AT-AT walks to unstable so I decided to use the walk of a horse.I got the simple walk structure ready but still need to do the fine tune.The AT-AT can knee, it can walk, it can move out the bridge (I removed the bridge for now to keep the weight down), it can turn, it shows the temperature and later it should be able to scan the environment with an ultrasonic range sensor and maybe I add some speaker.
The dimensions are: 60cm x 60cm x 17cm.The weight I don't know.
If I forgot to say something you want to know please ask.
So now some pictures :

this is the hacked joystick
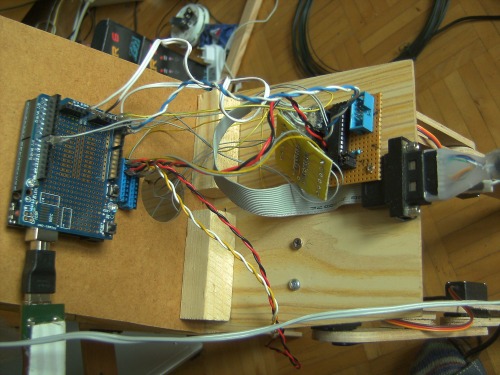
the arduino and the mcp23017
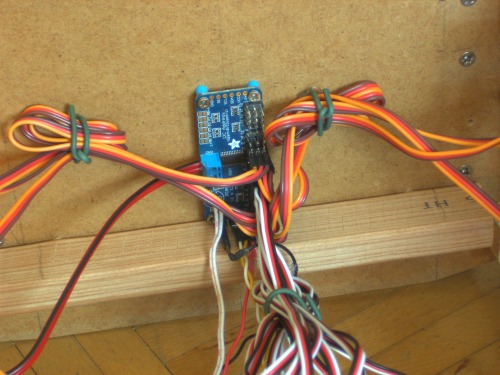
the adafruit servo controller board

the lcd

the hacked 4x4 keypad

the CD drive used as a boarding bridge
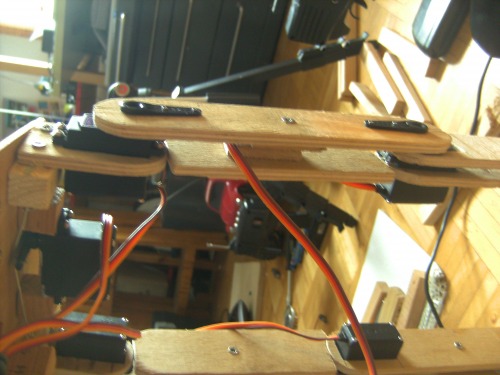
and one leg from the side