It is my first time using arduino, I am trying to upload the code to the board but it gives me an error. I need to upload my arduino UNO board to get it to sync? I have already installed the libraries, checked everything and still the same error persists. Do you have a guide or any help you can give me.
That’s the error:
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xea
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xea
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xea
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xea
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xea
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xea
Failed uploading: uploading error: exit status 1
This error message is quite generic so it could be caused by many reasons, to discard that it is an issue with the shield please try to upload an example (like blink LED) without the shield attached.
If the error persists try the solutions explained here:
The code is uploaded. But this code still does not work for me. It does not move the robot.
That’s the code:
int E1 = 6; //M1 Speed Control
int E2 = 5; //M2 Speed Control
int M1 = 8; //M1 Direction Control
int M2 = 7; //M2 Direction Control
void setup()
{
int i;
for(i=5;i<=8;i++)
pinMode(i, OUTPUT);
Serial.begin(9600);
}
void loop()
{
int leftspeed = 255; //255 is maximum speed
int rightspeed = 255;
analogWrite (E1,255);
digitalWrite(M1,LOW);
analogWrite (E2,255);
digitalWrite(M2,LOW);
delay(100);
}
I no longer get errors when I upload the code. I have always had pins 0 and 1 disconnected. The battery I’m using is the Lipo 3.7 V that the kit brought me. In addition, I tested it with the USB charging port and in the same way the same error continues to come out. The PWD pulses don’t arrive.
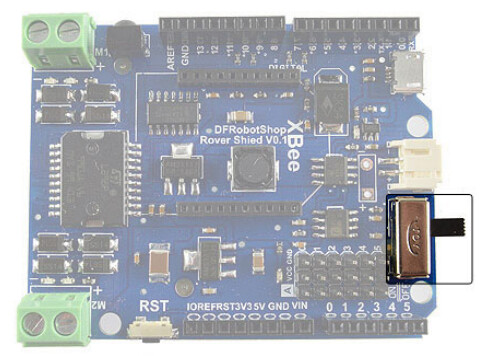
To charge it you have to connect the battery to the JST connector and the USB port to a device that can supply power (ideally a computer or wall adapter which provides 5V @ 500mA or higher). If you are using a computer with USB 2.0 ports charging should take around 2 hours, if you have USB 3.0 ports it should take a little more than an hour.
Also, make sure that the switch is On to connect the battery to the rest of the board.