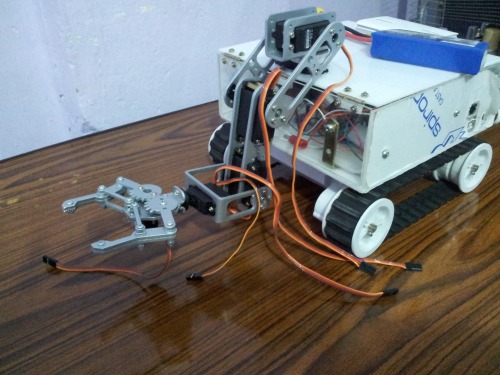
Our robot consists of (Rover car , Robotic arm , Arduino mega , Ethernet shield connected to a portable router)
Rover car : 4 dc motors
Robotic arm : 6 Servo motors
our robot has two modes
1) manual mode
in this mode you can control the robot using an android app manually you can move the rover car in the direction you want and also you can move each motor in the robotic arm in a specified angle using a slider bar for each motor .
2) Automatic mode or artificial mode
in this mode the robot suppose to distinguish the garbage basket from the surrounding enviroment we thought we can achieve that using ir emitter and ir receiver . we will put the ir emitter on the garbage basket and the ir receiver will be on the robot as the robot moves randomly it's supposed to avoid any obstacle in its way using ultrasonic sensors if the ir receiver receives the ir signal the robot will stop in its position and keeping turning around in all direction if it receives the signal again the robot will move in the direction of the signal for 1 second and then repeat turning around it receives the signal again then it will move in the signal direction for another 1 second and keep repeating this algorithm until it became infront of the basket and then the robotic arm will deal with it
Our Questions ???
1) how many ultra sonic sensors we are suppose to purchase ?
2) and where can we put it on the robot to be very efficient in avoiding obstacles ?
collect garbage (prototype project)
Control method: u can control it manually or u can let it deal automatically
Operating system: Windows
Power source: lithum battery12 v
Programming language: Java, Android
Sensors / input devices: Ultrasonic sensor and ir receiver and emitter
Try using the LMR Search Page (the link is above the Shout Box, top right corner) and search for things like “ultrasonic obstable avoidance”.
You’ll find many, many examples of different numbers of ultrasonic sensors used in different configurations. You can compare your robot to some of the other projects here to get an idea of what sort of arrangement will work best for you.
i know that i can find alot of examples but i am asking for advice bro :) as this site is full of experts so plz help me and show me where can i put my ultra sonic sensors and how many sensors i will need
Does your robot ever move backwards or move forward while turning at the same time?
If you only need to check a wide area in front of your robot you should try using 2 ultrasonic sensors that are crossed like this: Cerberus v2
If the robot has to detect objects to the side and back you can just add more sensor pairs. Because your robot is quite large compared to the sensor beam width, using crossed pairs of sensors will make sure you don’t miss thin objects like chair legs.
may be in some circumstances it should act like the following when it discovers an object infont of it in this case it has to calculate the distance on the left side and th right side and then go backward for 2 seconds and turn and move in the direction of the bigger number left distance > right distance
You’ll probably get better marks if you get some parts and experiment for yourselves… make sure to write down what was good or bad about the different attempts, and why you decided to use the final option.
You could also mount the sensors on servos to scan the area in front of and around the bot. They could be pointed towards the direction of an intended path and could be used to help eliminate blind spots. This approach adds to the complexity of the software but could reduce the total number of actual sensors. Nice design, looking forward to seeing what you come up with.