



AouTeam Needs help !!!
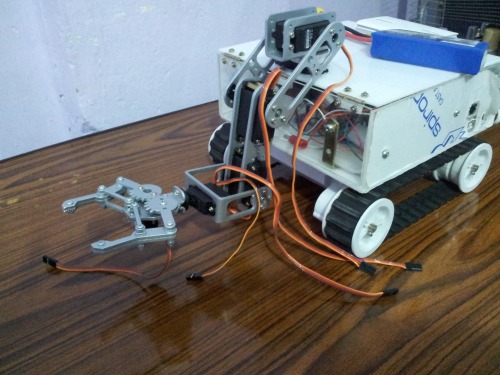
Our robot consists of (Rover car , Robotic arm , Arduino mega , Ethernet shield connected to a portable router)
Rover car : 4 dc motors
Robotic arm : 6 Servo motors
our robot has two modes
1) manual mode
in this mode you can control the robot using an android app manually you can move the rover car in the direction you want and also you can move each motor in the robotic arm in a specified angle using a slider bar for each motor .
2) Automatic mode or artificial mode
in this mode the robot suppose to distinguish the garbage basket from the surrounding enviroment we thought we can achieve that using ir emitter and ir receiver . we will put the ir emitter on the garbage basket and the ir receiver will be on the robot as the robot moves randomly it's supposed to avoid any obstacle in its way using ultrasonic sensors if the ir receiver receives the ir signal the robot will stop in its position and keeping turning around in all direction if it receives the signal again the robot will move in the direction of the signal for 1 second and then repeat turning around it receives the signal again then it will move in the signal direction for another 1 second and keep repeating this algorithm until it became infront of the basket and then the robotic arm will deal with it





Our Questions ???
1) how many ultra sonic sensors we are suppose to purchase ?
2) and where can we put it on the robot to be very efficient in avoiding obstacles ?
collect garbage (prototype project)
- Control method: u can control it manually or u can let it deal automatically
- Operating system: Windows
- Power source: lithum battery12 v
- Programming language: Java, Android
- Sensors / input devices: Ultrasonic sensor and ir receiver and emitter
- Target environment: indoor