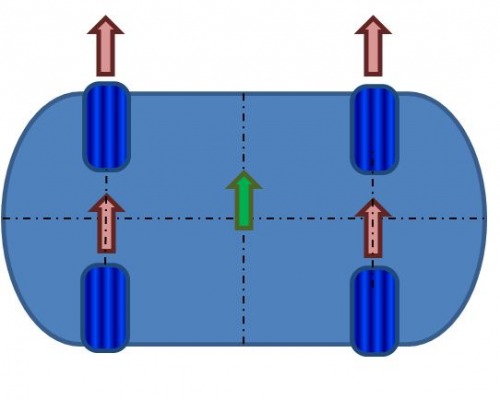
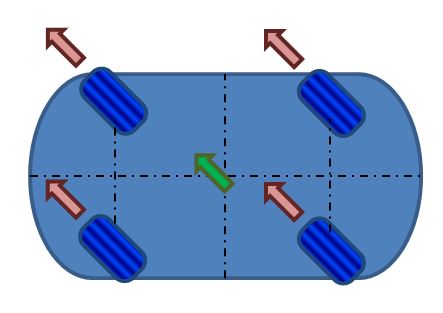
Andromina robot v.1.2 is a 4WD robotic platform with four directional wheels. The four wheels can independently turn. The robot can maneuver multiple ways. The motions of the robot are similar to a Mars rover of Nasa.
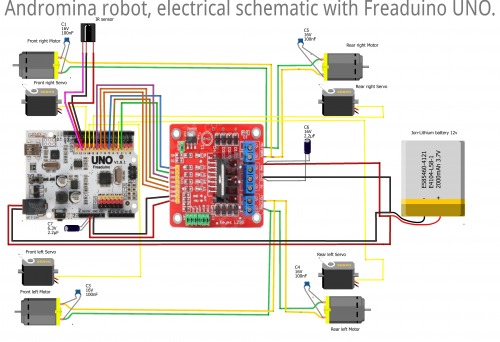
The robot allows be extended with several electronic devices; Arduino boards, Raspberry PI boards, Picaxe boards, robotic arms, web cams, LCD screens, encoders and other devices. In this post I show the Andromina robot which it is controlled to a IR remote control of a TV PHILIPS. The robot has the basic configuration, with an Arduino UNO board, a proto shield modified with a voltage regulator of 5v, a motor board and a IR remote control. In this configfuration the robot sketch is a bit complex and we can add a lot of movements and functions. In the sketch, we have set preset buttons with a maneuver or buttons for example to accelerate or turn the robot.
More information : http://androminarobot-english.blogspot.com.es/
Construction:
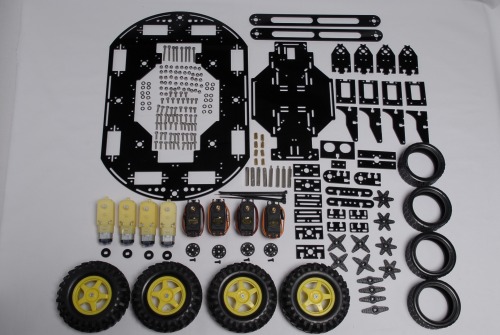
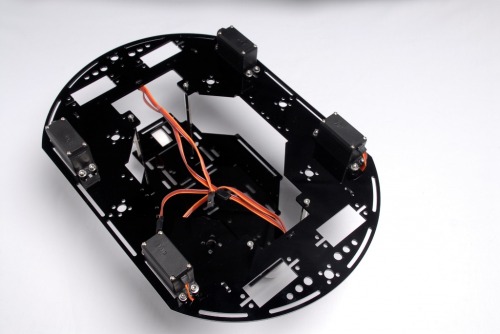
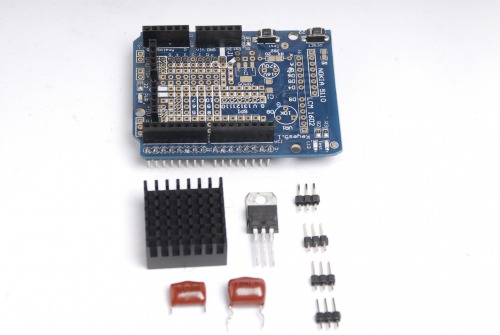
Next picture shows the assembly parts of robot:
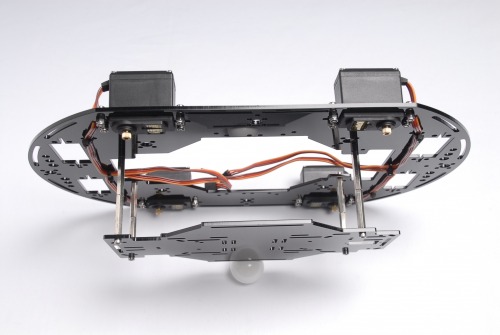
Main parts of the robot chassis are 2 acrylic plates, the superior plate and the inferior plate. The assembly of the chassis is shown in the picture above:
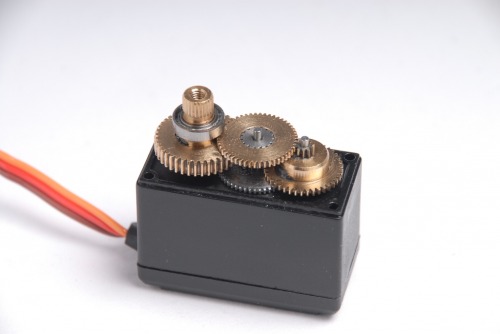
Andromina robot carries four servomotors "turrets" to rotate the four CC motors. The servomotors are very strong. The four servos have two ball bearings and several metal gears. You can see the pictures below. There is a picture shows one bearing and metals gears of the servos:
Very cool. How did you design this chassis, are these 3d printed parts? Or cut from sheet-metal? Did you model this first in a CAD program and printed/cut from there? I’d love to learn how to make these ind of intricate mechanics from scratch.
This design is made with black methacrylate sheets of 3mm or 4mm of thickness. I designed the sheets with Solid Works (CAD software). The sheets were cut in a company with a CNC machine.
I’m a fan of four wheel steering, this looks really nice. I did 4 wheel on my BRP with just two servos and linkages, but it cannot do all the moves yours will. Welcome to LMR! Keep us posted!
EDIT… so, this is not a personal project, but a company selling the chassis. I’ve been Bamboozeled!
Snap! Good catch Roxanna, I totally did not see this, and I actually did check out their link before! Very sneaky this one. I feel stupid about my earlier post now…
No! It is my personal project. I designed all the robot. What is the problem? I designed this robot with SolidWorks and a company cut the chassis and all parts. I bought other parts in several webs and assembled all parts in my house.
Sorry. I’m a robot fan. This robot is a personal idea and personal design. It is not a company selling the chassis. The robot makers like and want this robot chassis. They want to assemble a Andromina robot.
I see, sorry for the confusion, I thought you were a company because your robot was for sale as a kit, and I guess also because it looks just so professional I stand corrected, keep up the good work!
This is cool. I really want to start my own “Curiosity”, but i cant decide on a chassis design. I want something that i can expand onto, and that will be capable enough to play with properly. Yours looks really good. Well done!
If it were me, i would have the “turrets” for the motors, mounted on bearings on the main chassis, and then use servos to rotate them with cogs or similar. im sure there are no real problems, but i would avoid bearing the weight of the thing on the servo drive shafts.
It’s good idea, “turrets”. During the design I already had in mind. I had to select four optimal servos. Andromina robot not need “turrets” with bearings for the motors. The servos are very strong. The four servos have two ball bearings and several metal gears. You can see the pictures below. There is a picture shows the bearings and gears of the servos. Thanks for the idea.
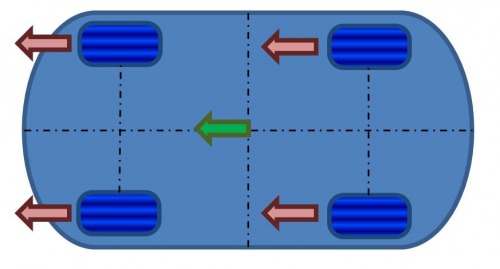
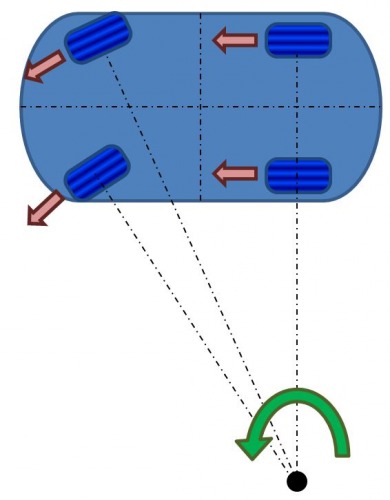
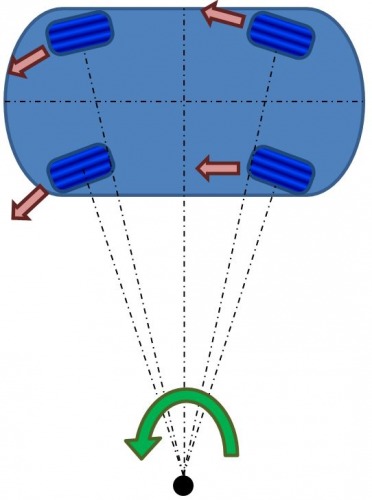
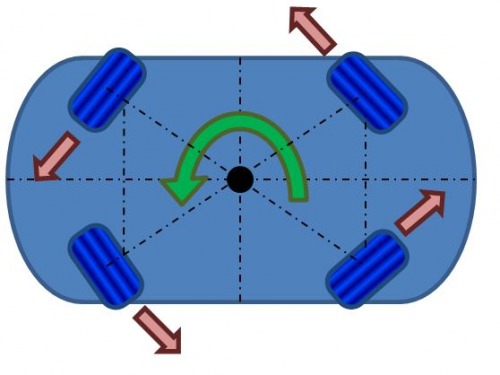
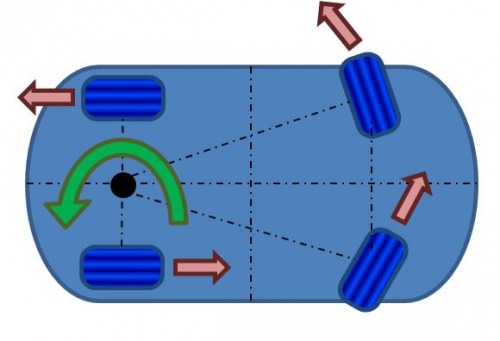
It can have a turning point anywhere outside the chassis by choosing the angle for all orientation servos, and can have a turning point anywhere inside the chassis, by spinning left motor forward and right motors backward and choosing the angle.
Just for the sake of knowing, how many turns on itself it can make in a minute?
Yes, it can have a turning point anywhere outside or inside the chassis. This robot configuration can turn on itself several revolutons. It can make 40 revolutions for minute approximately, plus or minus. It depends of the battery charge and voltage.
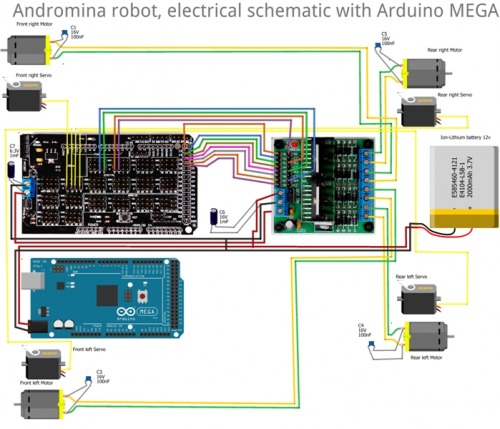
I update de information about Andromina robot. New wiring diagram with Arduino Mega and a 4 channel control board to 4 motors. This new distribution allows connect different electrical devices on the Arduino Mega. And It has a lot of free pines to connect sevomotors, IR sensors, robotic arms, ultrasonic sensors, a Xbee board … and more.






 I stand corrected, keep up the good work!
I stand corrected, keep up the good work!