

This is my second robot car. It is controlled wirelessly by an android phone with the help of a bluetooth headset.
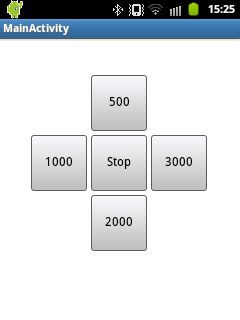
The theory is that an android application plays four different audio frequencies (500 Hz, 1000 Hz, 2000 Hz and 3000 Hz) which comes out from the bluetooth headset's speaker, these audio signals are then fed to an Op Amp which amplifies them and sends them to picaxe which do functions accordingly.
I am using the count and select command on picaxe so it counts the pulses coming on b.7 pin and responds to it as i programmed.
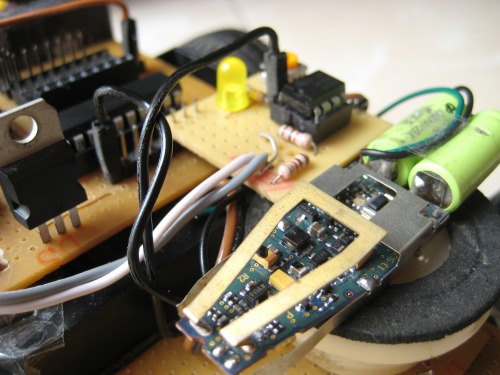
The audio signals coming out of the BT headset's speaker port are analog and are of low voltages (less than 1 volt which picaxe can't count) so i have used an Op Amp (LM358) which converts them to digital pulses and that too at 5 volts!! :D In the picture below the black wire is going to picaxe and i also connected an Led which lights when an output signal is going out of op amp as an indicator. In the video it is shown working.
The android application. It has 4 buttons and each plays the audio frequency written on it.
freq. action
500 - move forward
1000- turn left
2000- move backwards
3000- turn right
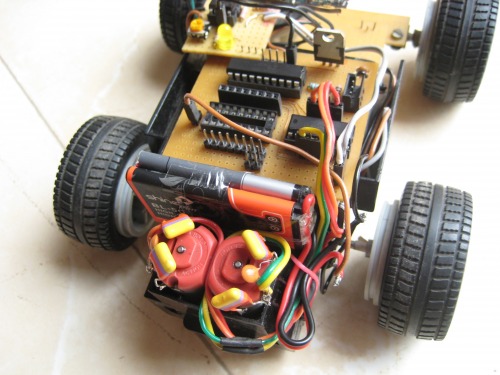
Some more pics->
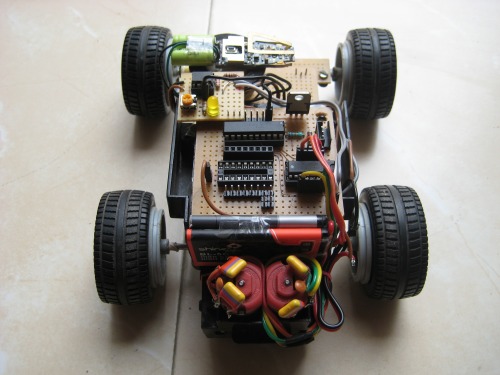
I am using 4 AA size cells to power picaxe and Op Amp and two nokia (BL-C5) 3.7 volts 1000mAh batteries in series to drive two motors.
Video coming soon :)
Thank you :D
Controlled via audio signals coming from bluetooth connected to a phone
- Actuators / output devices: 2 geared motors
- Control method: Bluetooth, audio signals
- CPU: Picaxe 20m2
- Operating system: Windows 7
- Power source: 4 AA batteries, two 3.7 volts 1000 mAh batteries
- Programming language: Picaxe basic
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/android-controlled-via-bt-picaxe-car
 (wink wink, nudge nudge), very cool!!!
(wink wink, nudge nudge), very cool!!! But it is not necessary to have an android app for this, any phone (or maybe laptops, PC) which has BT can be used by playing frequencies in the music player
But it is not necessary to have an android app for this, any phone (or maybe laptops, PC) which has BT can be used by playing frequencies in the music player