

*New Update*
If you are interested in my other robots/projects please visit my personal webpage at www.secondrobotics.com
*Older Update*
I recently took Alfred to a class of kids, they were having robot week. So Alfred went to visit we had him use his text to speech to say all of the kids names as well as read a story to the kids as my wife flipped though a book, I knew if I did not have the robot move around the kids might not have though of alfred as a true robot so I loaded up roborealm and had it chase a green ball around the room carried by the children here is a video of the kids playing with the robot. At the end I had Alfred serve the children some juice by this time they were super excited to meet a real robot. As you can see in the video the room had a few green colored objects on the wall that confused the vision software, I also reduced the speed at which the robot moved as not to fighten them. All and all if was a fun experiance for me as well as the kids.
I found a program to read the LM335 sensor and calibrated it. I then kicked on the TeC fridge to see what temps I could get I got down to a measured 51.40 F which im very happy with. Its a temperature that covers alot of wine serving temps. I now need to work on a program that can keep the temperature at the desired temp I set.

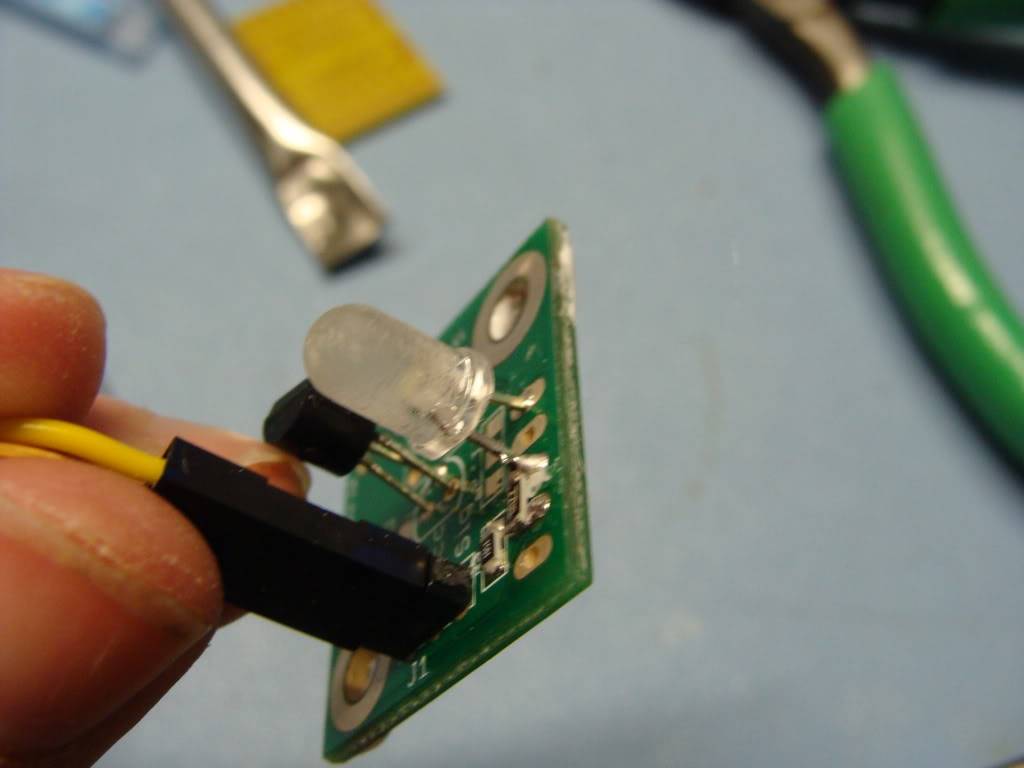
Small but oh so awesome update It occured to me that everytime I open the my own fridge is a nice white light that shines everyware so I decited to add a super bright LED to the LM335 precision temperature sensor board. I scuffed up the plastic of the LED to defuse the light a bit and volla a fully functioning fridge that can be temperature controlled. I also can account for the heat given off by the LED so the temp will be accurate. I used non-conductive thermal epoxy to mount the board.

*First Post*
So the project will be to make my very own butler bot, I will call him Alfred and it shale be that
To start here is a site I used to blog Alfred's progress
http://www.lynxmotion.net/viewtopic.php?f=20&t=7051
I wanted a robot butler so I set out to create something useful I ended up with a robot that can pump wine into a glass once it detected one, though I did not stop there I added a on board 50 Watt TEC mini fridge to keep the temperature of the wine down as It served it. Though that's when I started getting into trouble with the battery life with the fridge on the main battery pack will last about 40 mins. I use a solid state dual realy control board to switch on the TEC and the pump. For higher lvl processing there is a sony viao on the top level doing vision processing with RoboRealm.
It has on board a 5 port usb hub that is powered by a DC to DC converter off the main pack this allows the robot to play music though on board speakers when a laptop is not available or to simple be a charger for mobile devices.

Here is the mini fridge made of Styrofoam and a layer of carbon fiber.
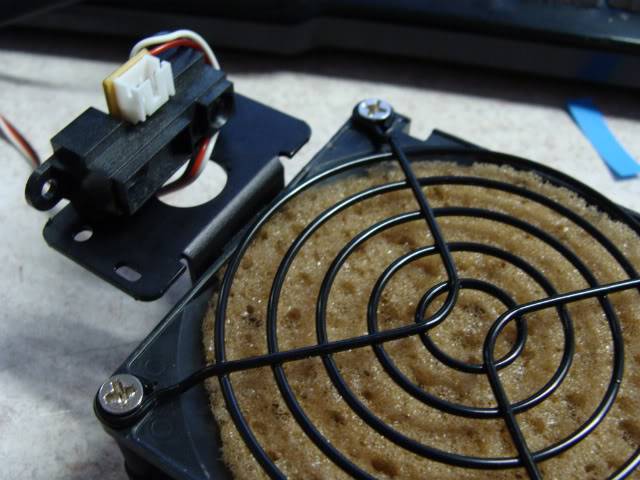
Here is a drip collector I made by gutting a 80mm computer case fan and inserting a sponge n case of drips

Some of the earlier pictures of the process

Here is a link to the video of it serving tea at a lan party
http://s155.photobucket.com/albums/s291/ollopat/?action=view¤t=MOV03556.mp4
Features:
Drink pouring system(on board TEC chiller)
Pandora radio
charging system for I-pod or phone(anything that uses usb to charge)
on board robo-realm navigation and higher lvl processing
5 volt DC-DC converter
Future upgrades:
bigger battery pack for longer run time
sensor's and lots of em so that the base can navigate with out the laptop if needed
remote docking to charge
Hope you like the video, please feel free to ask questions or leave comments
DoCDoC
Serves chilled wine among other things
- Actuators / output devices: 1x windscreen wiper water pump, Two DC motors, 1 Servo for pan, TEC
- Control method: autonomous (very)
- CPU: Arduino Mega 2560
- Operating system: Linux (Ubuntu), windows 7 64bits
- Power source: li-ion laptop batteries rated at 2200ah so the battery pack is about 12v at 4400ah
- Programming language: Arduino Processing
- Sensors / input devices: Logitech Webcam, multiple Sharp IR
- Target environment: The house
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/alfred-the-butler-bot-advanced
 I plan to have a solar panel to add juice to the system as it will most likely operate outdoors in sunlight. In reality it will probably only add minutes to the runtime. I’m also considering pulsing the TEC to conserve power once it gets to a stable temp inside the unit. If the cooling assembly gets turned off it immediately starts to sink the heat from environment back into the cold-side heatsink, which is a bummer.
I plan to have a solar panel to add juice to the system as it will most likely operate outdoors in sunlight. In reality it will probably only add minutes to the runtime. I’m also considering pulsing the TEC to conserve power once it gets to a stable temp inside the unit. If the cooling assembly gets turned off it immediately starts to sink the heat from environment back into the cold-side heatsink, which is a bummer.