

I just setup an AL5D and it seemed to go through the calibration just fine. When I run the controller software and click on any of the action buttons the arm snaps down into the same position every time and I have to power cycle the arm to get it to reset. Any thoughts?
I’m going to need some more information so we can get to the bottom of this.
What operating system are you running the program on? We can only guarantee compatibility on Windows XP, Vista, and 7.
Did you download and install the latest version of the program found here: lynxmotion.com/p-822-free-download-lynx-dual-arm-controller.aspx
Did you complete the Dimensions and Calibration sections of the Calibration Program BEFORE you ran the Control software?


Did you install the programs with Administrative rights?
Is your arm wired to the SSC-32 such that:
0 - Base
1 - Shoulder
2 - Elbow
3 - Wrist
4 - Gripper
5 - Wrist Rotate (Optional)
The only way I was able to recreate the Start up crash situation you are seeing while under perfect conditions was to delete the calibration file the program needs to operate the arm. After verifying your connections I would try downloading the program files again, reinstall the software, and then redo the calibration.
-DevonI am Windows 7 64bit. I will try reinstalling the software again. All of my connections appear to be correct.
I got it working, but when I run a sequence of saved positions in a loop it throws in random positions. However, it is usually the same random position.
When you first start the program there is already a starting position defined. You cannot delete this position; however, you may overwrite it with another position.
So, I am back to where I started. When I first turn on the arm it will move to the home position. Once I press any of the control buttons in the Controller it snaps to the same position no matter which button I push. I have attached images of each position. You should be able to see the photos here: plus.google.com/u/0/116477914471424818246/posts
Is there any market for reselling these?
You might want to give us a little more time to resolve the issue. It’s only been 24 hours and we are actively trying to help you. There are other programs you can download for free. Have you tried any of them? There could be mechanical or electrical issues with your build. Can you provide a picture of the servo controller so we can check its wiring and jumper settings?
Here’s the picture of the servo controller. I have tried it with the jumper between the two power inputs on and off. plus.google.com/u/0/116477914471424818246/posts/XbC3Lgf5gh9. I am a bit frustrated that I am having difficulties, but I am looking at selling it because I don’t think it is going to be as precise as I need it to. As for the software, I have used FlowBotics studio and it responds great. I just don’t know how to create sequences in it.
The image shows the VS1=VL jumper installed. This will directly connect the 9vdc battery to a higher current 6vdc supply. The 6vdc supply will win and the 9vdc battery will be depleted in short order. This will cause lots of problems like the SSC-32 browning out and resetting, which would look like it going to a start up position somewhat randomly.
Remove the jumper and get a fresh 9vdc battery. It should be acting better.
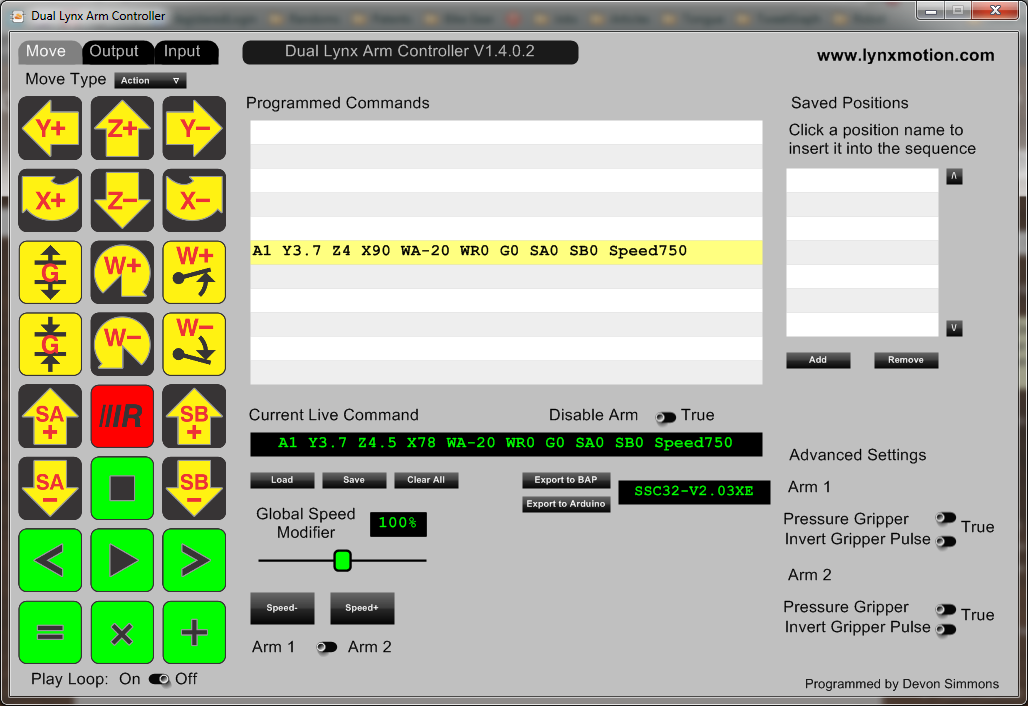
Can you please provide me with a screen shot of the program during the crash and upload the file located at
%appdata%\Lynxmotion\Dual Lynx Arm Controllerfor me?
860
7.11111
2230
9.11111
3220
9.66667
1000
11.1111
800
15
1500
11.1111
4.475
7.375
5.75
1000
10
1000
10
////////////////////
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
!!!!!!!!!!!!!!!!!!!!!!!!
2350
1480
1820
1000
1180
1820
2000
1000
1000
2000
800
2300
1000
2000
1000
2000
///////////////////
2200
1500
2000
1000
1000
2000
2000
1000
1000
2000
2000
1000
1000
2000
1000
2000
Alright. Before I roll a new installer and post this on the software page i’d like for you to test it for me. Simply download the file and place it on your desktop and run it. You’ll notice two windows are now on the program. You can ignore these and try to use the program normally.
Here the link: dl.dropbox.com/u/12992509/Dual%20Lynx%20Arm%20Controller%20REBUILD%20DEBUG.exe
That build worked, but the arm is extremely slow to respond and very shaky. Also, the arm is very limited in its range of motion in z and y.
What type of serial connection are you using? a usb to serial adapter or a true serial port? If you’re using an adapter what brand is it?
Could you post a video of the arm moving?
The USB to serial adapter I am using is the FTDI one lynxmotion.com/p-699-usb-to-serial-adapter-cable.aspx. The motion of the arm seems to be limited when I control it in Flowbotics as well. It was not prior to installing the Controller build you just sent. Here is the link to the video youtu.be/yi0bgHTyh2Y
Also, I tried a different computer and got the same results.
Upon a second attempt of running the build you sent I was having trouble getting the arm to respond. After deleting the build and downloading it again I got it to respond, but its range of motion was limited. Here is video of it youtu.be/yi0bgHTyh2Y. I am using the FTDI usb to serial adapter lynxmotion.com/p-699-usb-to-serial-adapter-cable.aspx and I have set the driver settings to those suggested here lynxmotion.net/viewtopic.php?t=4702.
I also experienced the issue described in this post. Downloaded the Rebuild Debug file, which gave me the same issues as dcknight describes: it seems to work, but slow and brisky. But at least it works. Rather strange issue, as the RIOS and LynxTerm software work fine. Just the Dual Arm Controller does not, and I will (likely) need it to control the arm programmatically.
Glad to be participating in this thread, let me know if you need more info.
Pieter
Alright I’m still having problems recreating the scenarios i’m seeing in the video. Could you both press this key combo:
ctrl + pauseThis will bring up the system information window. Please take a screen shot of this window and post it for me.