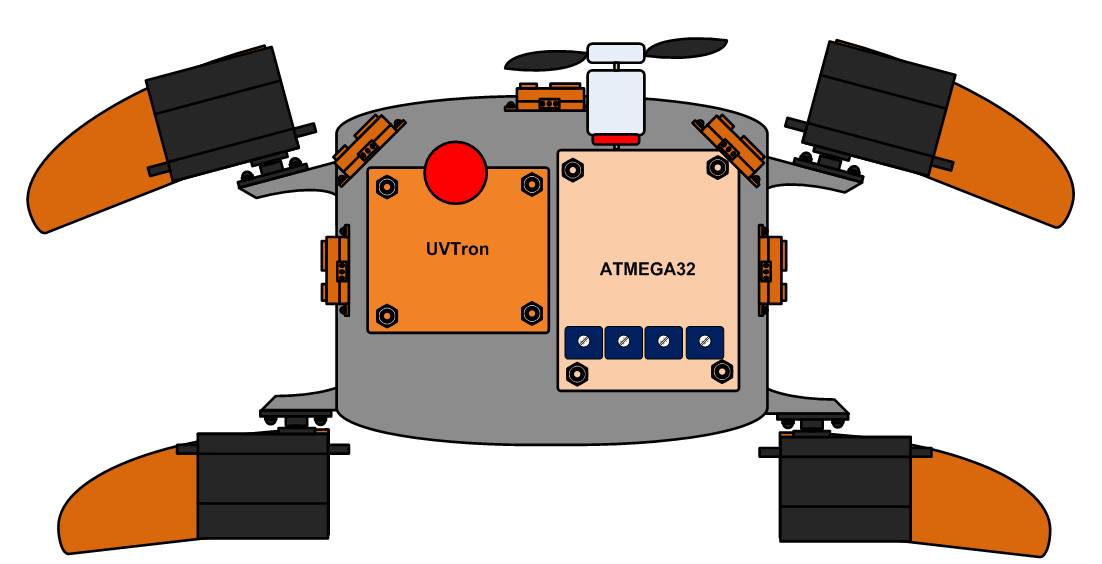
The name was not explain that the processor used is Altera. ;) This robot i've built with my robot team to join the robot contest in my country. I like the material used to form the body, it's make from PCB. The PCB used to embedd the processor too. I use ATMega32 as processesor, and my friend wrote the program using C. Soon, i'll upload the video of this robot, it walk like a turtle, looking for the fire and extinguish it.
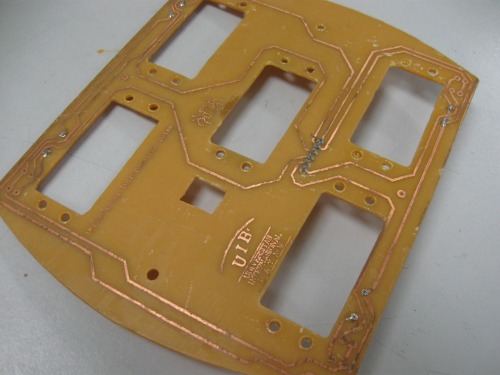
The first body design is using clear acrylic with 2 mm of thickness..so heavy! It's make the servos work hard, and some of them get the gear broke. So i've idea to change the body using PCB, the light ones. Here the bottom..
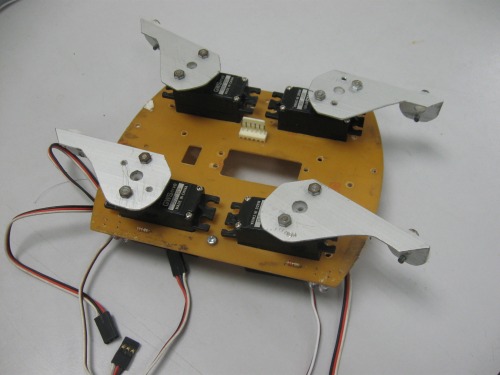
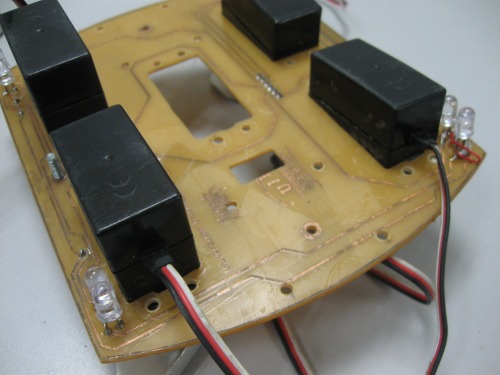
The bottom body is use to hold the servos, and the line sensor are attached too.
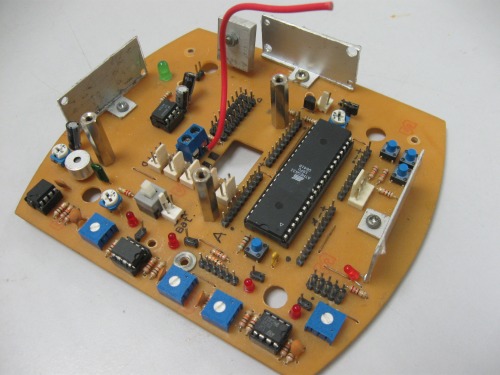
Top body were hold the circuits, there are minimum system for ATMega32, line detector, tone decode and fan driver in one board...the simply way :D
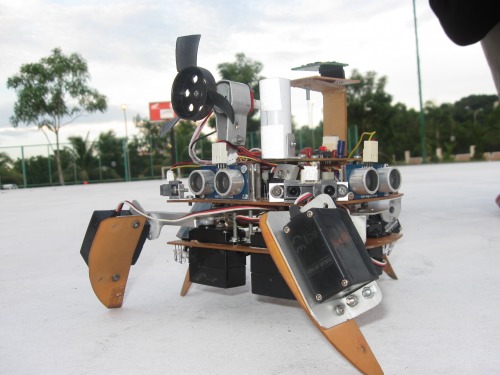
the "wings" ...
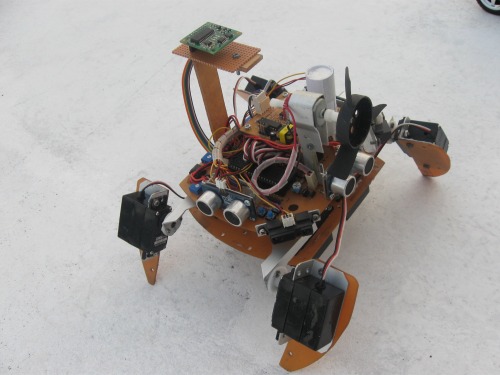
For improvement of navigation, i've add compass module...but BTW it's not looks like a turtle again..pufhh.
I’ve upload the video, see the pretty turtle…or crab!!! The movement is not so good, sometimes make scratch on my floor… the servos were not good enough to support the movement i’ve design…<i think> :). I use the standard SO3T GWServos, here are the specs:
They seem like pretty good servos. It might be possible to add a smooth plate to the bottom of the robot, and add some rubber or silicon to the feet. The turtle movement is fun, interesting.
Yes…i did, my previous design was added a smooth plate to help reduce the friction…but the “turtle” became sway when it walk. And it’s so disturbing the sensor’s work…so i can control the movement well. But i think it can be covering the servos from damage when it touch the floor. Is it the good servos ones??? Glad make you interest …thanks