

(old)
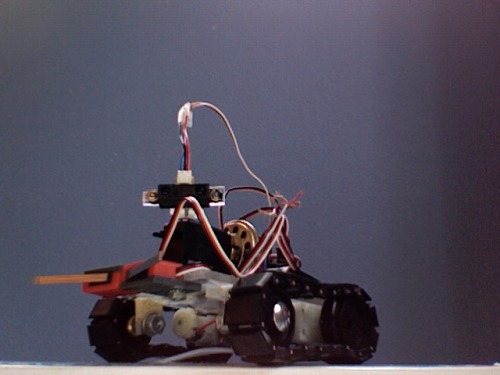
Well, here is Abraham. He is named after the American tank, mostly because he has tank treads. (M1 Abrams, any army guys around driven one?) He looks cool, but I NEED SOME SERIOUS HELP!!!
1st) Do you think I should glue little segments of rubber band to his treads like this...
or keep 'em bare so I can skid steer better?
2nd) My servo does not work. I am going to hook up ground and volt directly to the batteries this time.
3rd) The start here code does not upload. I get an error message saying that "hardware not found on (whatever the path of my USB cable)"
But other than that he's pretty good! Does anyone know what kind of pwm Vex servos take? I just might have to switch to that.
Here's a couple more pics:
Side:

Bottom:

Yup, that's it. Thanks for the help guys!
UPDATE: (old)
My servos are working, but I would like help making a bumper switch so that the robot backs up, turns, and goes forward when it hits something. Any help would be appreciated!
Update:
Everything is working great! Motors turning, servo swinging, etc. I have attached a Sharp GP2D12 infrared analog range sensor and two microswitches with metal arms. I figured out how to write the entire program instead of using the Start Here code, mostly because it won't work. Chris spent a lot of time helping me, but eventually I pissed him off because I didn't read all the manuals. Hey, I ■■■■ everybody off at one point or another, Zanthess can testify! Thanks Chris and everybody else that helped! From now on, however, I am not ever going to try and use the shoutbox for help. Probably what I should have been doing in the first place.
weird effect...

Yeah, well until I make a video, that is pretty all there is to see!
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/abraham
