

1 - Background
This small ABBC v1 (Another Basic Biped Clon Version 1) its based on bigfoot created by David L. Bucley. This is a great bot for begining to explore the design of mini-robotics. The following project is disigned using basic and old parts that anyone can find at home.
2 - Parts of ABBC
The design , as I say before, its based on bigfoot, for a descriptive build you can see this link from the original design.
2.1 Part List
First its needed two servos. In this case its used two different size servos. Micro and mini servo. Its important to note that both servos could be of the same size and shape. In figure 2.1.1 its shown the main parts for ABBC v1.

Figure 2.1.1 - Main parts for ABBC.
- Servo Turnigy Mini
- Servo Turnigy Micro TG9e
- 3 Paper Clips 50 mm
- An old 3 1/2 Floppy
- 2 big plastic tubes from Marshmellow lollipop
- A lot of small Screws (1/4'' - 6mm)
- 2 RG LEDs (1 resistor 300 - 330 ohms)
- 2 LDRs (10 k Potenciometers)
- 4 small plastic rings
- Female cables (jumper wires)
- 2 Plastic ballons base
2.2 Basic status eyes
For the status eyes, its used two RG (Red - Green) LEDs, in this way the bot will express if and obstacle its in front of him or not. The design is basic and simple, and its shown in figure 2.1.1, also the plastic tube will work as a neck for ABBC.
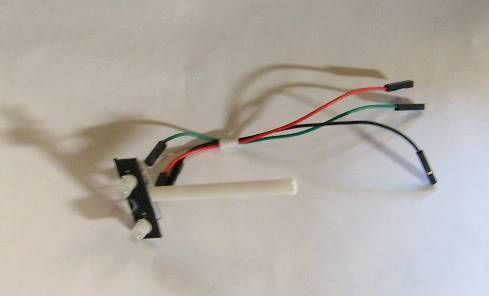
Figure 2.1.2 - Basic eyes for ABBC.
2.3 Foot Design
The feet are created with the plastic ballon base, and are attached to the plate cutted from the floppy disk. In figure 2.1.2 its shown the basic desing of the foot.

Figure 2.1.3 - Foot created for ABBC v1
2.2.4 Body of ABBC
The body contains all the servos and legs of ABBC, for this part are cutted two faces from the floppy disk, small holes are made to attached both servos and legs. In figure 2.1.4 its shown the parts for the body and the preliminary assembling.
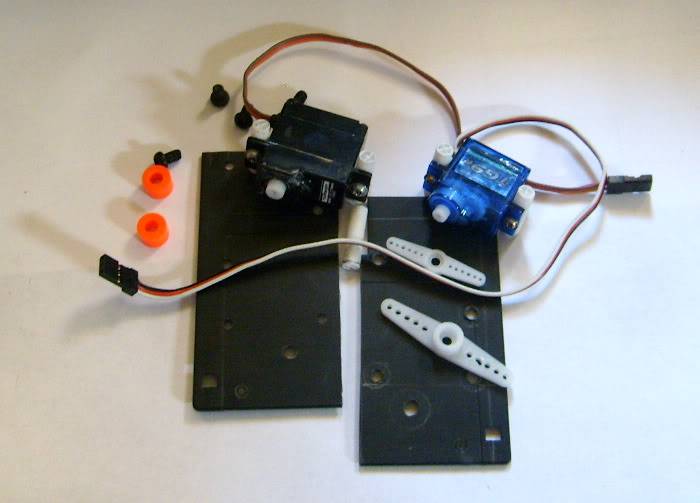

Figure 2.1.4 - Parts for the body and preliminary assembling of ABBC v1
Also the leg wire are created from the 2 paper clips, and assembling to the bot as shown in figure 2.1.5.


Figure 2.1.5 - Clip used as leg wire.
2.2.5 BackPack
A backpack its designed to put the microcontroller and the battery. In figure 2.1.6 its shown all the parts to create this backpack.

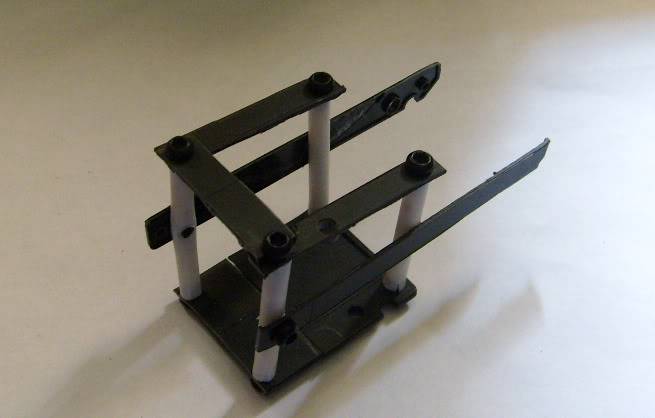
Figure 2.1.6 - Design of the backpack for ABBC
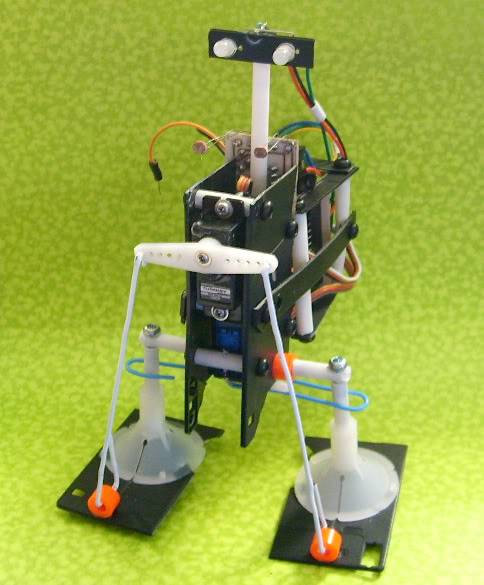
Finally all parts are attached to create bot´s body.
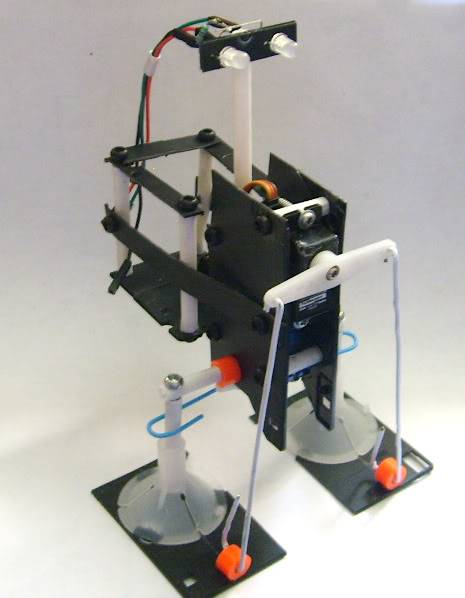
Figure 2.1.7 - ABBC final look.
2.2.6 Soon ...
3 - Tests
Soon...
Basic walking bot
- Actuators / output devices: 2 servos, 2 LEDs
- Control method: autonomous
- CPU: Teensy
- Operating system: MacOS X
- Power source: 3.6V NiMH
- Programming language: Arduino / C++
- Sensors / input devices: Photoresistors
- Target environment: indoors
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/abbc-v1
