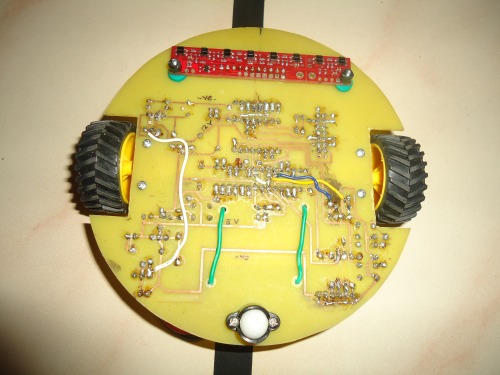
This is a basic Line follower based on PID Algorithm. The robot base is home made PCB. The robot is running at 1.2 m/Sec. The PID configuration is still in progress. I believe with a good PID value it can go up to 1.5 m/sec. Robot consists of two 6 volts motors running at 9 volts through adjustable voltage regulator.
I made the robot round shaped as it will perform two functions
1. Line following
2. Line maze solving
Maze solving code is still in progress.
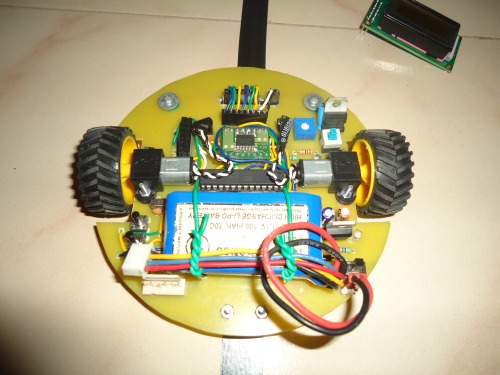
Parts Used are
Microcontroller - Atmega328 PU running at 20MHz
Motor Driver-TB6612FNG
Sensor-Pololu QTR 8A
The Pololu QTR 8A has 8 IR sensors of which 6 are used as Atmega328 PU DIP package has only 6 ADC channels.
This is a companion discussion topic for the original entry at https://community.robotshop.com/robots/show/a-pid-controlled-fast-line-following-robot
Cool. Very fast and accurate
Cool. Very fast and accurate line follower.
Wow. Impressively fast and
Wow. Impressively fast and snappy. I like this one a lot!
maze solving
Thanks. Robot is now doing 1.5 m/s with slightly changed PID value.
As I have said before i am working with maze solving part I will test that on the weekend and upload video.
Nice one!
Can u send me coding? My I’d is [email protected]
Code
Thanks,My code is messy and hard to read. The base code is taken from pololu avr library (Download pololu avr library http://www.pololu.com/docs/0J20/2.a) and changed according to characteristics and pin configuration of my robot.
wheels
These are Tamiya Truck Tire Set (http://www.pololu.com/catalog/product/65).Though they are made for hex shaft I have somehow fitted them in my D-Shaft motors. Pololu Wheel 42x19mm Pair (http://www.pololu.com/catalog/product/1090) should be more appropriate choice.
Code and circuit
Where can I get the code and circuit diagram for the line following part alone?
can you please give me the
can you please give me the values of P, D, and I?
also how did you scale the variables?
did you scaled the
pos = qtra.readLine(6);
pos = pos - 2500; // (center line target = 0)
did you scaled pos after this?
or did you scaled
power_diff = propp + integi+deriv*d;
power_diff = power_diff/scaler;
?
**Values of kP, kD and kI? **
Please let us know ur robot’s values of PID constants?
**please post me the code **
i want to try a line follower robot. i wil be hapy, if you post me code . thank you… [email protected]
**Motors **
Can you send me the description of the motors you used.
voltage regulator
Which voltage regulator did you use from pololu, and also which battery did you use
help
would you help me with the code ? [email protected] and thank you
Schematics and code
Can I have the schematics and code? Any kind soul?
@game_seek plz help me out, i have been working day and night to get the perfection you achieved. Please send me your approach, code for maze solver to my email “[email protected]”. It would help me out a lot. Getting through the pololu libraries will be difficult for me for the time left for competition. DO HELP ME OUT. PLZ.

