A PID controlled Fast Line following Robot
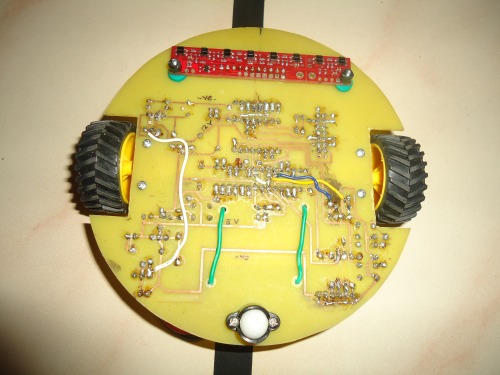
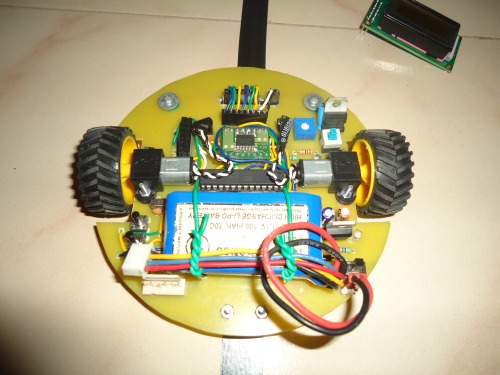
This is a basic Line follower based on PID Algorithm. The robot base is home made PCB. The robot is running at 1.2 m/Sec. The PID configuration is still in progress. I believe with a good PID value it can go up to 1.5 m/sec. Robot consists of two 6 volts motors running at 9 volts through adjustable voltage regulator.
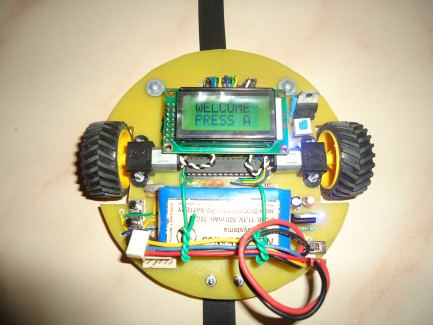
I made the robot round shaped as it will perform two functions
1. Line following
2. Line maze solving
Maze solving code is still in progress.
Parts Used are
Microcontroller - Atmega328 PU running at 20MHz
Motor Driver-TB6612FNG
Sensor-Pololu QTR 8A
The Pololu QTR 8A has 8 IR sensors of which 6 are used as Atmega328 PU DIP package has only 6 ADC channels.