Isma
June 11, 2024, 8:53am
1
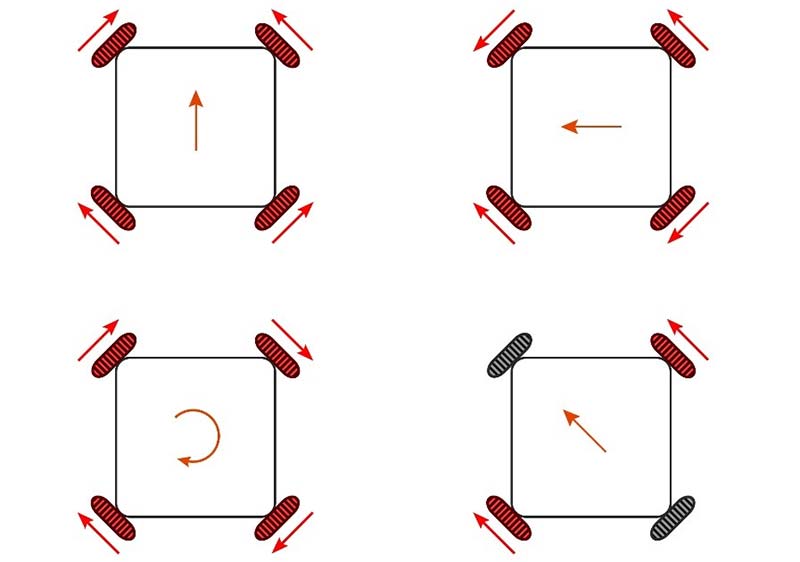
Hello, i bought the4WD omni wheel robot, i succeded rotating the robot.
Rotation function that works :
void rotation () {
analogWrite(PWM1,200);
digitalWrite(IN1,HIGH);
analogWrite(PWM2,200);
digitalWrite(IN2,HIGH);
analogWrite(PWM3,200);
digitalWrite(IN3,HIGH);
analogWrite(PWM4,200);
digitalWrite(IN4,HIGH);
}
igor_X
June 11, 2024, 9:46am
2
Hello @Isma ,
Maybe this can be helpful:
#include <math.h> // Include for trigonometric functions
// ... (Your existing rotate() function and pin definitions)
void steer(float angle, bool isRadians = false) {
// Convert to radians if input is in degrees
if (!isRadians) {
angle = angle * M_PI / 180.0;
}
// Determine individual wheel speeds based on angle
int frontLeftSpeed = 200 * (cos(angle) - sin(angle));
int frontRightSpeed = 200 * (cos(angle) + sin(angle));
int backLeftSpeed = 200 * (-cos(angle) - sin(angle));
int backRightSpeed = 200 * (-cos(angle) + sin(angle));
// Apply speeds and directions to motors (adjust for your wiring)
digitalWrite(IN1, frontLeftSpeed >= 0 ? HIGH : LOW);
analogWrite(PWM1, abs(frontLeftSpeed));
digitalWrite(IN2, frontRightSpeed >= 0 ? HIGH : LOW);
analogWrite(PWM2, abs(frontRightSpeed));
digitalWrite(IN3, backLeftSpeed >= 0 ? HIGH : LOW);
analogWrite(PWM3, abs(backLeftSpeed));
digitalWrite(IN4, backRightSpeed >= 0 ? HIGH : LOW);
analogWrite(PWM4, abs(backRightSpeed));
}
Isma
June 12, 2024, 12:35pm
3
Thank you, it looks working but when it’s about low speed in some wheels, the robot doesn’t move, looks like it’s too heavy for the motors. Is it normal ?
Angle : 1,5708 (180°)
igor_X
June 12, 2024, 3:51pm
7
Maybe you need to synchronize it better.
Something like this:
Isma
June 12, 2024, 5:14pm
8
That’s only predefined direction where the wheels need the same speed. Not a personalised direction.