As soon as I have so more time to work on this robot I am planning to publish all my files and add more information to this page.
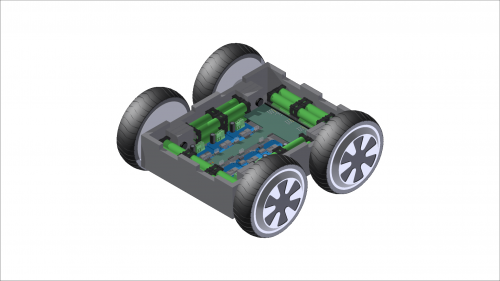
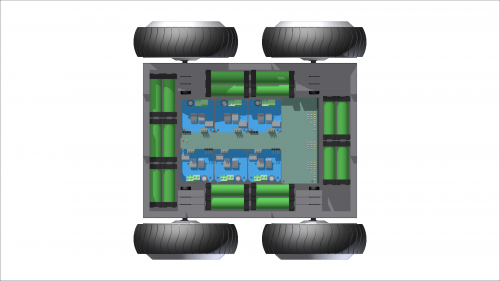
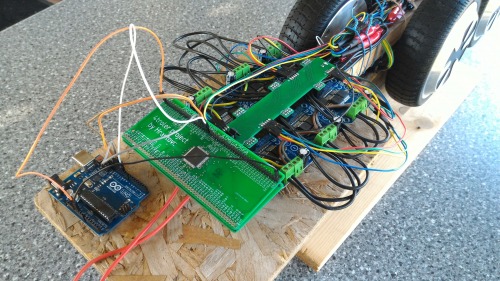
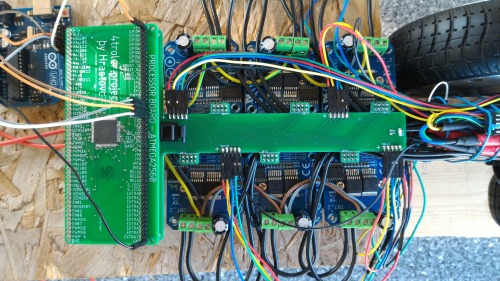
This robot uses hoverboard motors and custom electronics for driving 4 sensored BLDC motors. The robot is still in development phase. I plan to publish all CAD files, PCB design files and the complete source code. Stay tuned for the update. To assemble the robot all you need is just some laser or water-jet cut aluminum panels and a drill. There is no welding required, because everything is designed to bolt together.
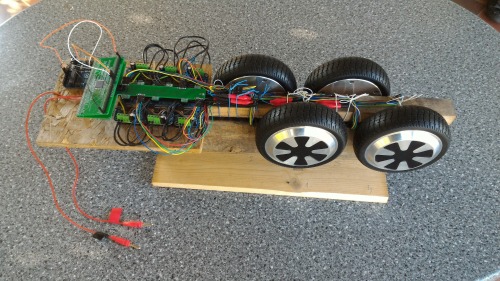
I can stand on it no problem. I don’t know what is the maximum payload capacity of those motors, but as they came from hoverboards I would assume each motor should support at least 50 kg or 110 lbs. If I had enough time I would make a stress analysis in CAD of the whole robot, but I don’t really need to know the payload capacity and the chassis is heavy duty enough as is.
I have some electric screwdrivers. The problem is that no electric screwdriver, not even with a torque clutch, gives you a positive feedback on how tight the screw is. These are relatively small M4 threads, cut in aluminium and can be easily stripped. That’s why I am using long screws to avoid that.
Can you tell me how you controll the hoverboard motors ?
Im building a rc lawn mower with hoverboard motors and the same motor controllers like you but i dont get a good result.
Is it possible that i can get your source code ?
Source code is available here: “Some design files (6.8.2018): https://goo.gl/CvvuSg”. This code works and is the same one as used during video shooting. Code still needs a lot of work. Happy to help.
I posted some of my design files “Some design files (6.8.2018): https://goo.gl/CvvuSg”. I don’t currently have time to work on this project and I don’t have anything new to share. I completed the assembly of the platform and wrote some basic SW so I could test the HW, but now I still have months of work to complete the SW.